Depth Perception
- Passive Stereo Depth - Used by non-Pro version of OAK-D and OAK4-D cameras.
- Active Stereo Depth - Used by Pro version of OAK cameras.
- Time-of-Flight Depth - Used by OAK-ToF.
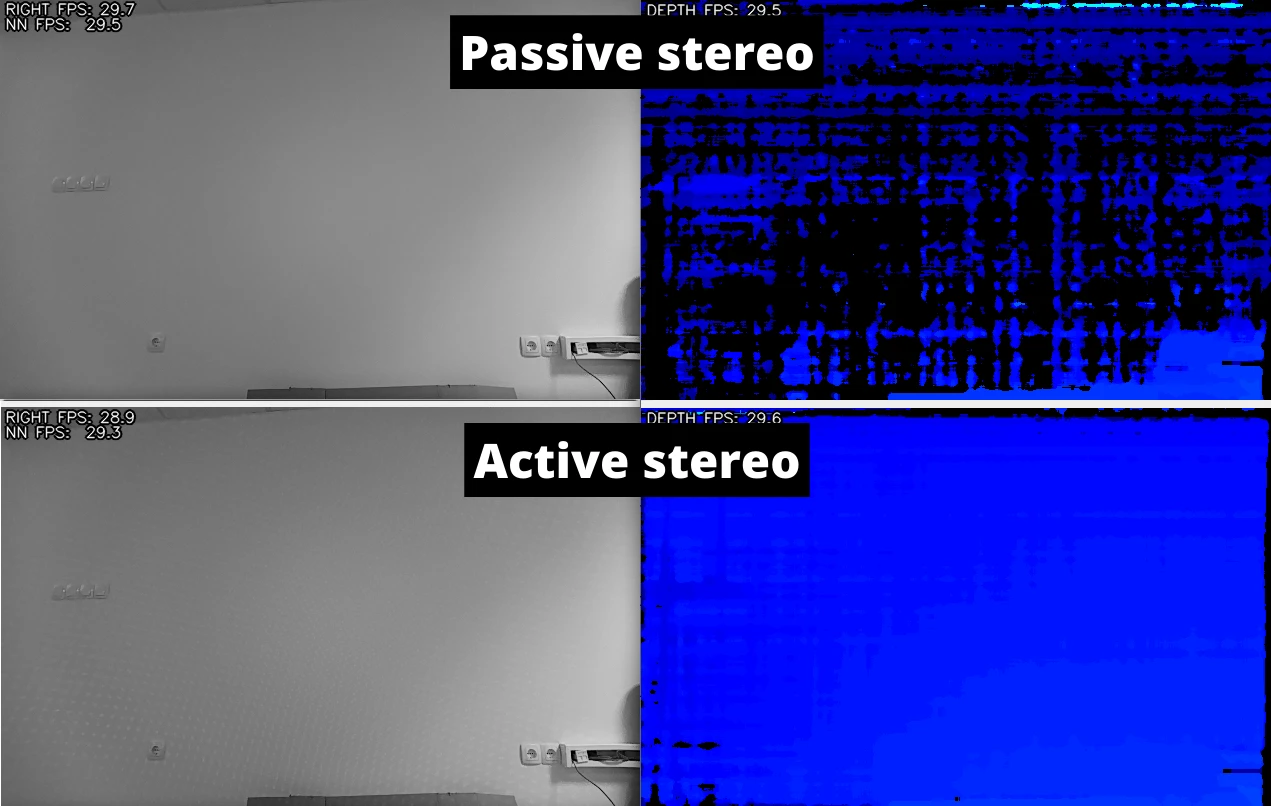
Passive Stereo Depth
Passive stereo depth perception may not work well with featureless surfaces like walls or ceilings, as disparity matching relies on distinctive points or features.
- Lighting/Texture: Stereo depth depends on feature matching, which can be challenging in low light or on featureless surfaces. Active stereo can resolve both texture and lighting issues.
- Calibration: Factory calibration is typically optimal.
- Postprocessing filters: More information can be found here (under Depth Filters). Additional filtering can be performed on the host side as well, e.g., WLS filter.
Active Stereo Depth
Time-of-Flight Depth