Preview manager
PreviewManager is a class that is made to help you with displaying previews / streams from OAK cameras.
Getting started
PreviewManager works hand in hand with the PipelineManager, so before you can use Preview, you will first have to declare and initialize the PipelineManager.
But of course you will also have to import both names to use them.
If you do not wish to use the PipelineManager you can also create and initialize the pipeline without the help of the manager. PreviewManager is created so that you can use only it seperatly.
1from depthai_sdk import Previews
2from depthai_sdk.managers import PipelineManager, PreviewManager
3import depthai as dai
4
5# create pipeline
6pm = PipelineManager()
7
8# creating color source
9pm.createColorCam(xout=True)
10
11# connecting to the device
12with dai.Device(pm.pipeline) as device:
13 # define configs for above sources
14 pv = PreviewManager(display=[Previews.color.name])
15
16 # create stream queues
17 pv.createQueues(device)
18 while True:
19 # prepare and show streams
20 pv.prepareFrames()
21 pv.showFrames()
As you can see from the above code, we first initialized the pipeline, after that we defined sources from where the pipeline will stream and after that we connected to the device. When the device is connected,
we can declare and initialize the PreviewManager and after that we can see the frames as outputs.
Example of use
1from depthai_sdk import Previews
2from depthai_sdk.managers import PipelineManager, PreviewManager
3import depthai as dai
4import cv2
5
6
7# create pipeline
8pm = PipelineManager()
9
10# define sources (color, left, right, depth)
11
12# creating color source
13pm.createColorCam(xout=True)
14pm.createLeftCam(xout=True)
15pm.createRightCam(xout=True)
16pm.createDepth(useDepth=True)
17
18# connecting to the device
19with dai.Device(pm.pipeline) as device:
20 # define configs for above sources
21 pv = PreviewManager(display=[Previews.color.name, Previews.left.name, Previews.right.name, Previews.depth.name])
22
23 # create stream queues
24 pv.createQueues(device)
25
26 while True:
27 # prepare and show streams
28 pv.prepareFrames()
29 pv.showFrames()
30
31 # end program with 'q'
32 if cv2.waitKey(1) == ord('q'):
33 break
In the above example we added a few more sources. Output of the above code should look something like this:
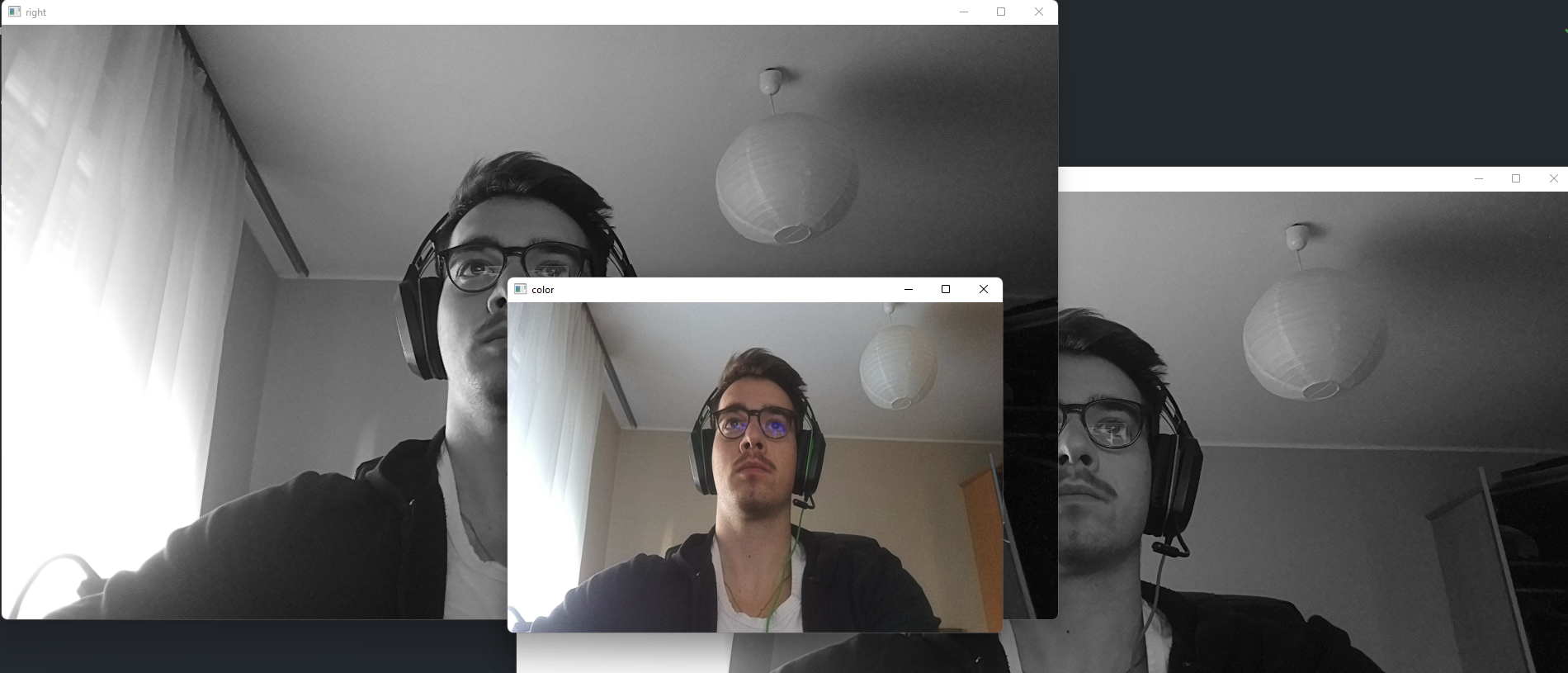
We get frames from all defined sources.
- class depthai_sdk.managers.PreviewManager
Manager class that handles frames and displays them correctly.
- frames = {}
Contains name -> frame mapping that can be used to modify specific frames directly
- Type
- __init__(display=[], nnSource=None, colorMap=None, depthConfig=None, dispMultiplier=2.65625, mouseTracker=False, decode=False, fpsHandler=None, createWindows=True)
- Parameters
display (list, Optional) – List of
depthai_sdk.Previewsobjects representing the streams to displaymouseTracker (bool, Optional) – If set to
True, will enable mouse tracker on the preview windows that will display selected pixel valuefpsHandler (depthai_sdk.fps.FPSHandler, Optional) – if provided, will use fps handler to modify stream FPS and display it
nnSource (str, Optional) – Specifies NN source camera
colorMap (cv2 color map, Optional) – Color map applied on the depth frames
decode (bool, Optional) – If set to
True, will decode the received frames assuming they were encoded with MJPEG encodingdispMultiplier (float, Optional) – Multiplier used for depth <-> disparity calculations (calculated on baseline and focal)
depthConfig (depthai.StereoDepthConfig, optional) – Configuration used for depth <-> disparity calculations
createWindows (bool, Optional) – If True, will create preview windows using OpenCV (enabled by default)
- collectCalibData(device)
Collects calibration data and calculates
dispScaleFactoraccordingly- Parameters
device (depthai.Device) – Running device instance
- createQueues(device, callback=None)
Create output queues for requested preview streams
- Parameters
device (depthai.Device) – Running device instance
callback (func, Optional) – Function that will be executed with preview name once preview window was created
- closeQueues()
Closes output queues for requested preview streams
- prepareFrames(blocking=False, callback=None)
This function consumes output queues’ packets and parses them to obtain ready to use frames. To convert the frames from packets, this manager uses methods defined in
depthai_sdk.previews.PreviewDecoder.- Parameters
blocking (bool, Optional) – If set to
True, will wait for a packet in each queue to be availablecallback (func, Optional) – Function that will be executed once packet with frame has arrived
- showFrames(callback=None)
Displays stored frame onto preview windows.
- Parameters
callback (func, Optional) – Function that will be executed right before
cv2.imshow
- has(name)
Determines whether manager has a frame assigned to specified preview
- Returns
Trueif contains a frame,Falseotherwise- Return type
- get(name)
Returns a frame assigned to specified preview
- Returns
Resolved frame, will default to
Noneif not present- Return type