lrcheck: used for better occlusion handling. For more information click hereextended: suitable for short range objects. For more information click heresubpixel: suitable for long range. For more information click here
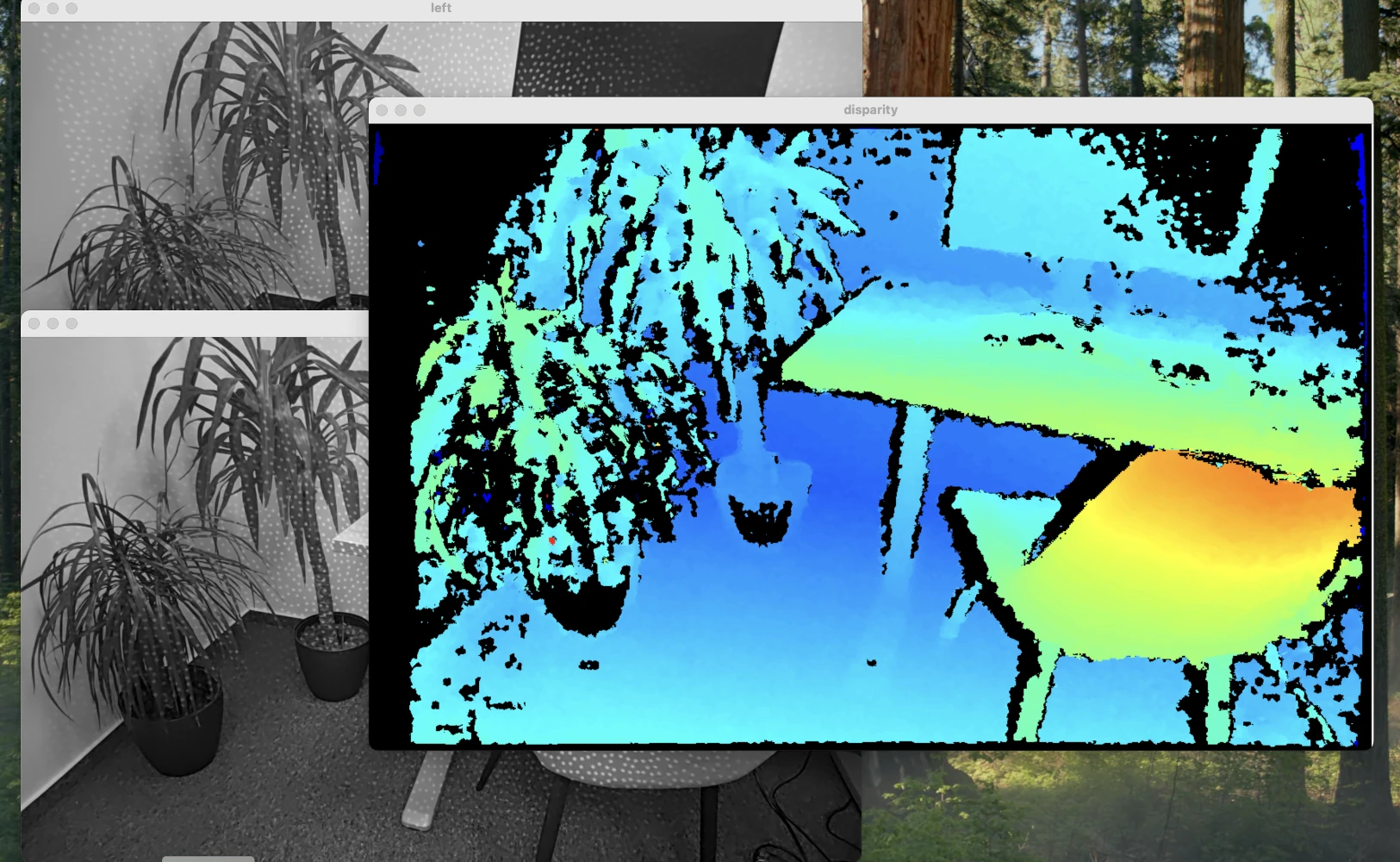
Demo
 This example requires the DepthAI v3 API, see installation instructions.
This example requires the DepthAI v3 API, see installation instructions.Pipeline
Source code
Python
C++
Python
PythonGitHub
1#!/usr/bin/env python3
2
3import cv2
4import depthai as dai
5import numpy as np
6
7pipeline = dai.Pipeline()
8monoLeft = pipeline.create(dai.node.Camera).build(dai.CameraBoardSocket.CAM_B)
9monoRight = pipeline.create(dai.node.Camera).build(dai.CameraBoardSocket.CAM_C)
10stereo = pipeline.create(dai.node.StereoDepth)
11
12# Linking
13monoLeftOut = monoLeft.requestFullResolutionOutput()
14monoRightOut = monoRight.requestFullResolutionOutput()
15monoLeftOut.link(stereo.left)
16monoRightOut.link(stereo.right)
17
18stereo.setRectification(True)
19stereo.setExtendedDisparity(True)
20stereo.setLeftRightCheck(True)
21
22disparityQueue = stereo.disparity.createOutputQueue()
23
24colorMap = cv2.applyColorMap(np.arange(256, dtype=np.uint8), cv2.COLORMAP_JET)
25colorMap[0] = [0, 0, 0] # to make zero-disparity pixels black
26
27with pipeline:
28 pipeline.start()
29 maxDisparity = 1
30 while pipeline.isRunning():
31 disparity = disparityQueue.get()
32 assert isinstance(disparity, dai.ImgFrame)
33 npDisparity = disparity.getFrame()
34 maxDisparity = max(maxDisparity, np.max(npDisparity))
35 colorizedDisparity = cv2.applyColorMap(((npDisparity / maxDisparity) * 255).astype(np.uint8), colorMap)
36 cv2.imshow("disparity", colorizedDisparity)
37 key = cv2.waitKey(1)
38 if key == ord('q'):
39 pipeline.stop()
40 breakNeed assistance?
Head over to Discussion Forum for technical support or any other questions you might have.