OAK vs RealSense™

Depth accuracy comparison
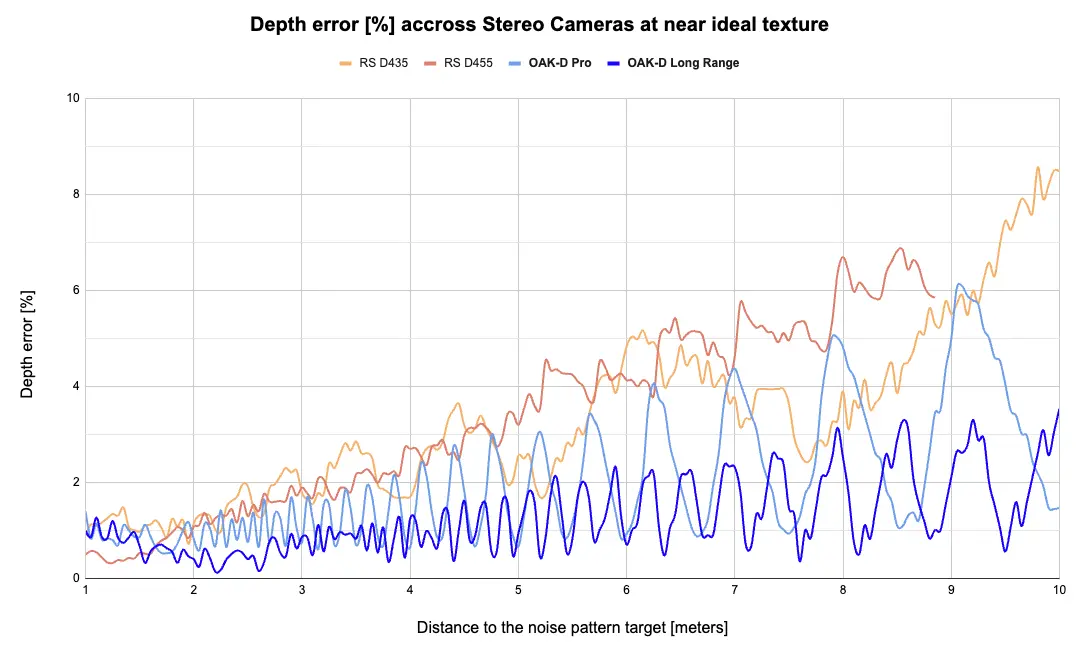 For more information, please visit OAK Depth Accuracy comparison docs.
For more information, please visit OAK Depth Accuracy comparison docs.Comparison overview
| Specification | OAK-D Pro / -W | OAK-D Lite | OAK ToF | D415 | D435 | D455 |
|---|---|---|---|---|---|---|
| RGB | IMX378 | IMX214 | IMX378 | OV2740 | OV2740 | OV9782 |
| RGB HFOV | 66˚ / 109˚ | 69˚ | 66˚ | 69˚ | 69˚ | 90˚ |
| RGB Shutter | Rolling / Global | Rolling | Rolling | Rolling | Rolling | Global |
| RGB resolution | 12MP | 13MP | 12MP | 2MP | 2MP | 1MP |
| Depth Type | Active Stereo | Passive Stereo | ToF | Active Stereo | Active Stereo | Active Stereo |
| Depth sensor | OV9282 | OV7251 | 33D ToF | OV2740 | OV9282 | OV9782 |
| Stereo Shutter | Global | Global | / | Global | Global | Global |
| Stereo baseline | 75mm | 75mm | / | 55mm | 55mm | 95mm |
| Depth HFOV | 72˚ / 127˚ | 72˚ | 70˚ | 65˚ | 87˚ | 87˚ |
| Min Depth | 20 cm | 20 cm | 20 cm | 45 cm | 28 cm | 52 cm |
| Depth resolution | 1280x800 | 640x480 | 1280x800 | 1024x768 | 1280x720 | 1280x720 |
| IR LED | ✔️ | - | ✔️ | - | - | - |
| ToF | - | - | ✔️ | - | - | - |
| IMU | ✔️ | - | ✔️ | - | ✔️ | ✔️ |
3rd party evaluation
Passive stereo (no IR dot projector)

Active stereo (IR dot projector)

On-device feature comparison
| On-Device Capabilities | OAK-D Pro | OAK-D Lite | D415 | D430-D435 | D450-D455 | F450 |
|---|---|---|---|---|---|---|
| Custom AI models | ✔️ | ✔️ | - | - | - | - |
| Object detection | ✔️ | ✔️ | - | - | - | - |
| Object tracking | ✔️ | ✔️ | - | - | - | - |
| On-device scripting | ✔️ | ✔️ | - | - | - | - |
| Video/Image Encoding | ✔️ | ✔️ | - | - | - | - |
| Image Manipulation | ✔️ | ✔️ | - | - | - | - |
| Skeleton/Hand Tracking | ✔️ | ✔️ | ✔️ | ✔️ | ✔️ | - |
| Feature Tracking | ✔️ | ✔️ | - | - | - | - |
| OCR | ✔️ | ✔️ | - | - | - | - |
| Face Recognition | ✔️ | ✔️ | - | - | - | ✔️ |
Features described
- Custom AI models - You can run any AI/NN model(s) on the device, as long as all layers are supported. You can also choose from 200+ pretrained NN models from Open Model Zoo and DepthAI Model Zoo.
- Object detection - Most popular object detectors have been converted and run on our devices. DepthAI supports onboard decoding of Yolo and MobileNet based NN models.
- Object tracking - ObjectTracker node comes with 4 tracker types, and it also supports tracking of objects in 3D space.
- On-device scripting - Script node enables users to run custom Python 3.9 scripts that will run on the device, used for managing the flow of the pipeline (business logic).
- Video/Image encoding - VideoEncoder node allows encoding into MJPEG, H265, or H264 formats.
- Image Manipulation - ImageManip node allows users to resize, warp, crop, flip, and thumbnail image frames and do type conversions (YUV420, NV12, RGB, etc.)
- Skeleton/Hand Tracking - Detect and track key points of a hand or human pose. Geaxgx's demos: Hand tracker, Blazepose, Movenet.
- 3D Semantic segmentation - Perceive the world with semantically-labeled pixels. DeeplabV3 demo here.
- 3D Object Pose Estimation - MediaPipe's Objectron has been converted to run on OAK cameras. Video here.
- 3D Edge Detection - EdgeDetector node uses Sobel filter to detect edges. With depth information, you can get physical position of these edges.
- Feature Tracking - FeatureTracker node detects and tracks key points (features).
- 3D Feature Tracking - With depth information, you can track these features in physical space.
- OCR - Optical character recognition, demo here.
- Face Recognition - Demo here, which runs face detection, alignment, and face recognition (3 different NN models) on the device simultaneously.
Modular design
 See stereo depth documentation on max depth perception calculations based on camera intrinsics/baseline distance.Intel, Intel RealSense and Intel Movidius Myriad are trademarks of Intel Corporation or its subsidiaries.
See stereo depth documentation on max depth perception calculations based on camera intrinsics/baseline distance.Intel, Intel RealSense and Intel Movidius Myriad are trademarks of Intel Corporation or its subsidiaries.