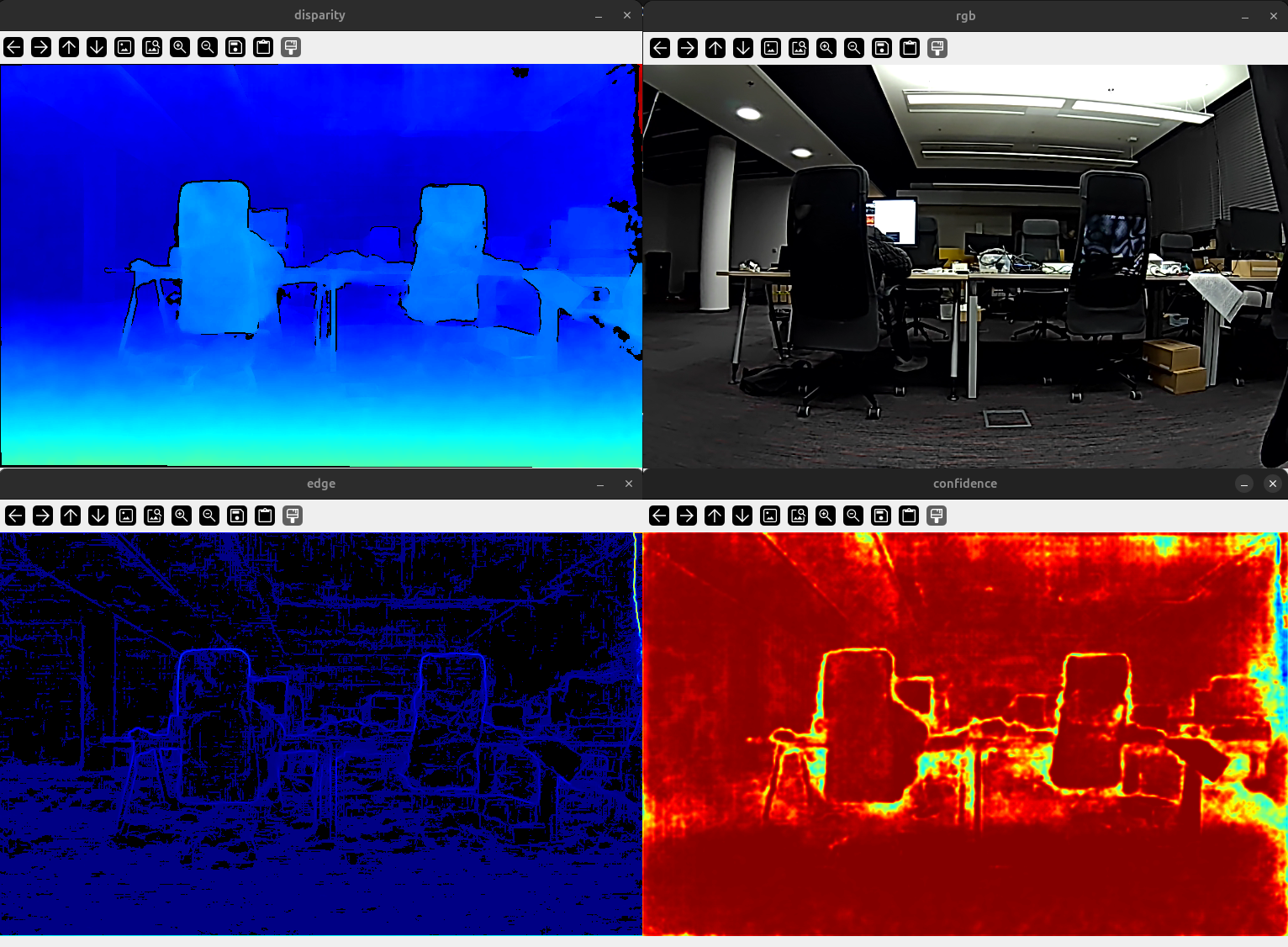
Neural Depth
Neural Depth
Supported on:RVC4
Demo
Pipeline
Source code
Python
PythonGitHub
1#!/usr/bin/env python3
2
3import cv2
4import depthai as dai
5import numpy as np
6
7FPS = 25
8# Create pipeline
9with dai.Pipeline() as pipeline:
10 cameraLeft = pipeline.create(dai.node.Camera).build(dai.CameraBoardSocket.CAM_B, sensorFps=FPS)
11 cameraRight = pipeline.create(dai.node.Camera).build(dai.CameraBoardSocket.CAM_C, sensorFps=FPS)
12 leftOutput = cameraLeft.requestFullResolutionOutput()
13 rightOutput = cameraRight.requestFullResolutionOutput()
14
15 neuralDepth = pipeline.create(dai.node.NeuralDepth).build(leftOutput, rightOutput, dai.DeviceModelZoo.NEURAL_DEPTH_LARGE)
16
17 confidenceQueue = neuralDepth.confidence.createOutputQueue()
18 edgeQueue = neuralDepth.edge.createOutputQueue()
19 disparityQueue = neuralDepth.disparity.createOutputQueue()
20
21 inputConfigQueue = neuralDepth.inputConfig.createInputQueue()
22 # Connect to device and start pipeline
23 pipeline.start()
24 maxDisparity = 1
25 colorMap = cv2.applyColorMap(np.arange(256, dtype=np.uint8), cv2.COLORMAP_JET)
26 colorMap[0] = [0, 0, 0] # to make zero-disparity pixels black
27 currentConfig = neuralDepth.initialConfig
28 print("For adjusting thresholds, use keys:")
29 print(" - 'w': Increase confidence threshold")
30 print(" - 's': Decrease confidence threshold")
31 print(" - 'd': Increase edge threshold")
32 print(" - 'a': Decrease edge threshold")
33 print(" - 't': Toggle temporal filtering")
34 while pipeline.isRunning():
35 confidenceData = confidenceQueue.get()
36 assert isinstance(confidenceData, dai.ImgFrame)
37 npConfidence = confidenceData.getFrame()
38 colorizedConfidence = cv2.applyColorMap(((npConfidence)).astype(np.uint8), colorMap)
39 cv2.imshow("confidence", colorizedConfidence)
40
41 edgeData = edgeQueue.get()
42 assert isinstance(edgeData, dai.ImgFrame)
43 npEdge = edgeData.getFrame()
44 colorizedEdge = cv2.applyColorMap(((npEdge)).astype(np.uint8), colorMap)
45 cv2.imshow("edge", colorizedEdge)
46
47
48 disparityData = disparityQueue.get()
49 assert isinstance(disparityData, dai.ImgFrame)
50 npDisparity = disparityData.getFrame()
51 maxDisparity = max(maxDisparity, np.max(npDisparity))
52 colorizedDisparity = cv2.applyColorMap(((npDisparity / maxDisparity) * 255).astype(np.uint8), colorMap)
53 cv2.imshow("disparity", colorizedDisparity)
54
55 key = cv2.waitKey(1)
56 if key == ord('q'):
57 pipeline.stop()
58 break
59 if key == ord('w'):
60 currentThreshold = currentConfig.getConfidenceThreshold()
61 currentConfig.setConfidenceThreshold((currentThreshold + 5) % 255)
62 print("Setting confidence threshold to:", currentConfig.getConfidenceThreshold())
63 inputConfigQueue.send(currentConfig)
64 if key == ord('s'):
65 currentThreshold = currentConfig.getConfidenceThreshold()
66 currentConfig.setConfidenceThreshold((currentThreshold - 5) % 255)
67 print("Setting confidence threshold to:", currentConfig.getConfidenceThreshold())
68 inputConfigQueue.send(currentConfig)
69 if key == ord('d'):
70 currentThreshold = currentConfig.getEdgeThreshold()
71 currentConfig.setEdgeThreshold((currentThreshold + 1) % 255)
72 print("Setting edge threshold to:", currentConfig.getEdgeThreshold())
73 inputConfigQueue.send(currentConfig)
74 if key == ord('a'):
75 currentThreshold = currentConfig.getEdgeThreshold()
76 currentConfig.setEdgeThreshold((currentThreshold - 1) % 255)
77 print("Setting edge threshold to:", currentConfig.getEdgeThreshold())
78 inputConfigQueue.send(currentConfig)
79 if key == ord('t'):
80 currentConfig.postProcessing.temporalFilter.enable = not currentConfig.postProcessing.temporalFilter.enable
81 print("Temporal filtering:", "on" if currentConfig.postProcessing.temporalFilter.enable else "off")
82 inputConfigQueue.send(currentConfig)
83
84 if cv2.waitKey(1) == ord('q'):
85 breakNeed assistance?
Head over to Discussion Forum for technical support or any other questions you might have.