BMI270
BMI270
- Vendor documentation: BMI270 datasheet
Overview
| Spec | Value |
|---|---|
| Axes | 6 |
| Physical sensors | Accelerometer, gyroscope |
| Magnetometer | No |
| Sensor-side derived outputs | None exposed as sensor-side fused orientation outputs |
| Absolute heading on-sensor | No |
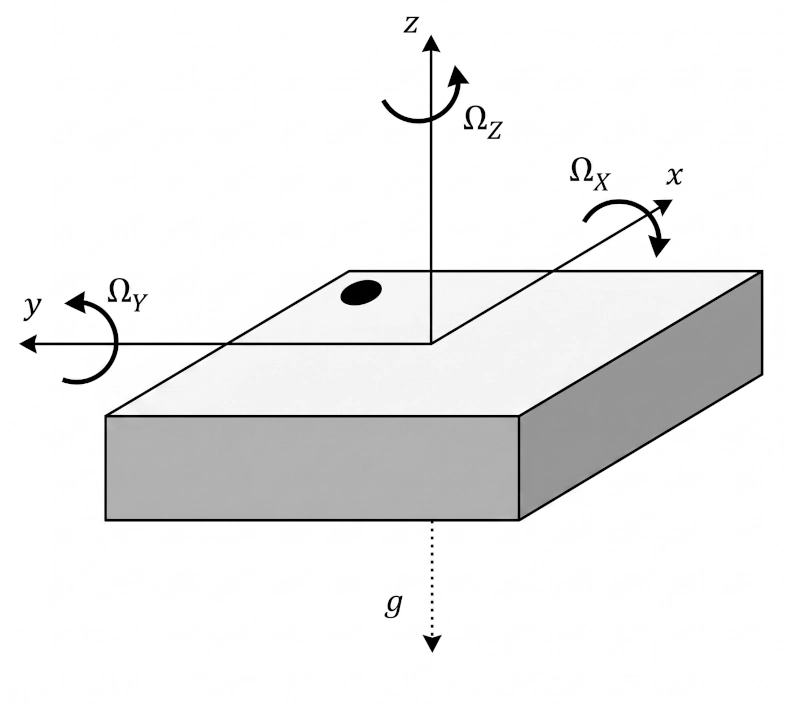
Orientation
Native silicon characteristics
| Signal | Full-scale options | Sensitivity / quantization | Noise density | Native ODR |
|---|---|---|---|---|
| Accelerometer | +-2 / +-4 / +-8 / +-16 g | 16384 / 8192 / 4096 / 2048 LSB/g | 0.16 mg/sqrt(Hz) typ | 12.5 Hz to 1600 Hz |
| Gyroscope | +-125 / +-250 / +-500 / +-1000 / +-2000 dps | 262.144 / 131.072 / 65.536 / 32.768 / 16.384 LSB/dps | 0.007 dps/sqrt(Hz) typ in performance mode | up to 6400 Hz |
DepthAI-exposed runtime behavior
| Spec | Value |
|---|---|
| Stable accelerometer request points | 25 / 50 / 100 / 200 / 250 Hz |
| Stable gyroscope request points | 25 / 50 / 100 / 200 / 250 Hz |
| Public max exposed report rate | Requests above 400 Hz currently top out around 250 Hz |
| Rate rounding behavior | Requested rate rounds down to the next supported rate |
Characterized noise parameters
| Axis | Accel noise density | Accel random walk | Accel bias stability | Gyro noise density | Gyro random walk | Gyro bias stability |
|---|---|---|---|---|---|---|
| X | 0.0500335019677985 | 0.0000373380684096123 | 0.0686458743689068 | 0.293340698256576 | 0.281106186280429 | 9.19265863311309 |
| Y | 0.0547290899833001 | 0.0000508202354023015 | 0.11014907055065 | 0.285186651912094 | 0.524351050783173 | 9.68103400378115 |
| Z | 0.0636134665575223 | 0.0000284520524391634 | 0.0446480943181604 | 0.301184640372767 | 0.250355639353424 | 6.93407320593193 |