DepthAI v2
Quick links to get started with the DepthAI softwareSoftware ecosystem
Software ecosystem that's built on top of the DepthAI APIDepthAI API
DepthAI API (Python, C++) allows users to develop and deploy vision pipelines that run on the accelerated hardware blocks on our devices.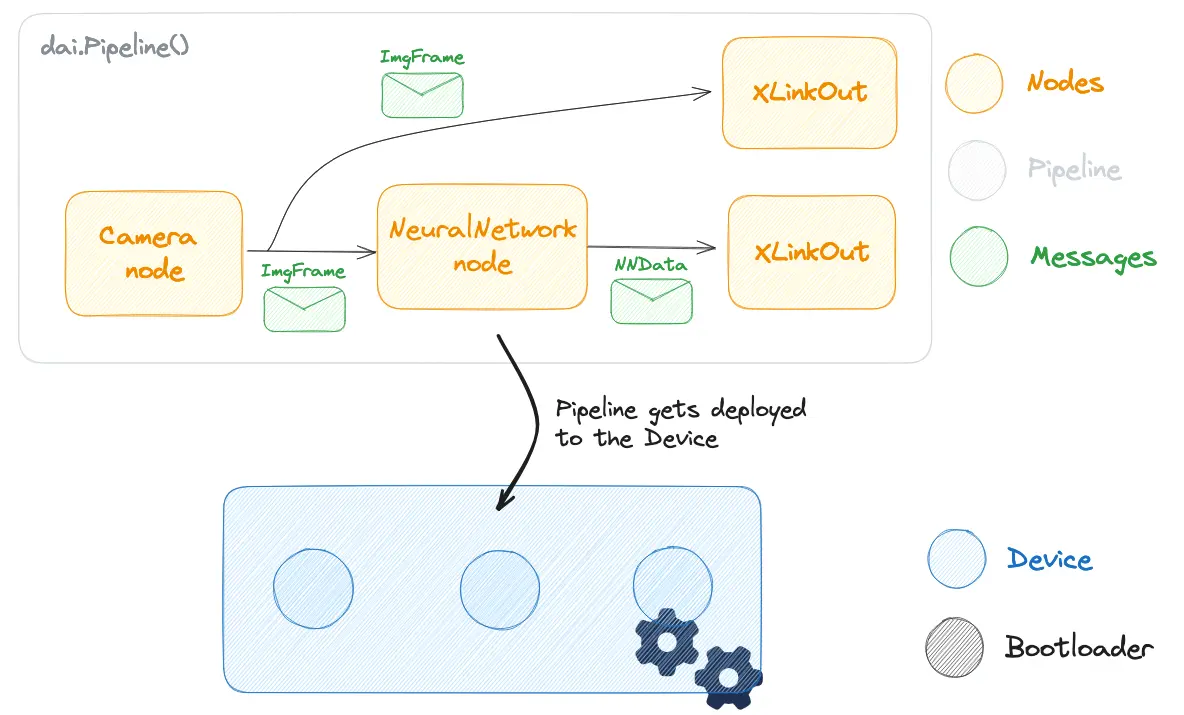
DepthAI Components
- Nodes represent a sensor, accelerated hardware, or some compute function
- Pipeline consists of linked nodes and gets deployed to the device where it runs on accelerated hardware blocks
- Messages are used for communication between nodes. They hold data and metadata
- Device represents Luxonis' device, either an OAK camera or a RAE. It handles connectivity and communication
- Bootloader handles logic when booting the device and makes device accessible for connection
