DynamicCalibration
主要功能
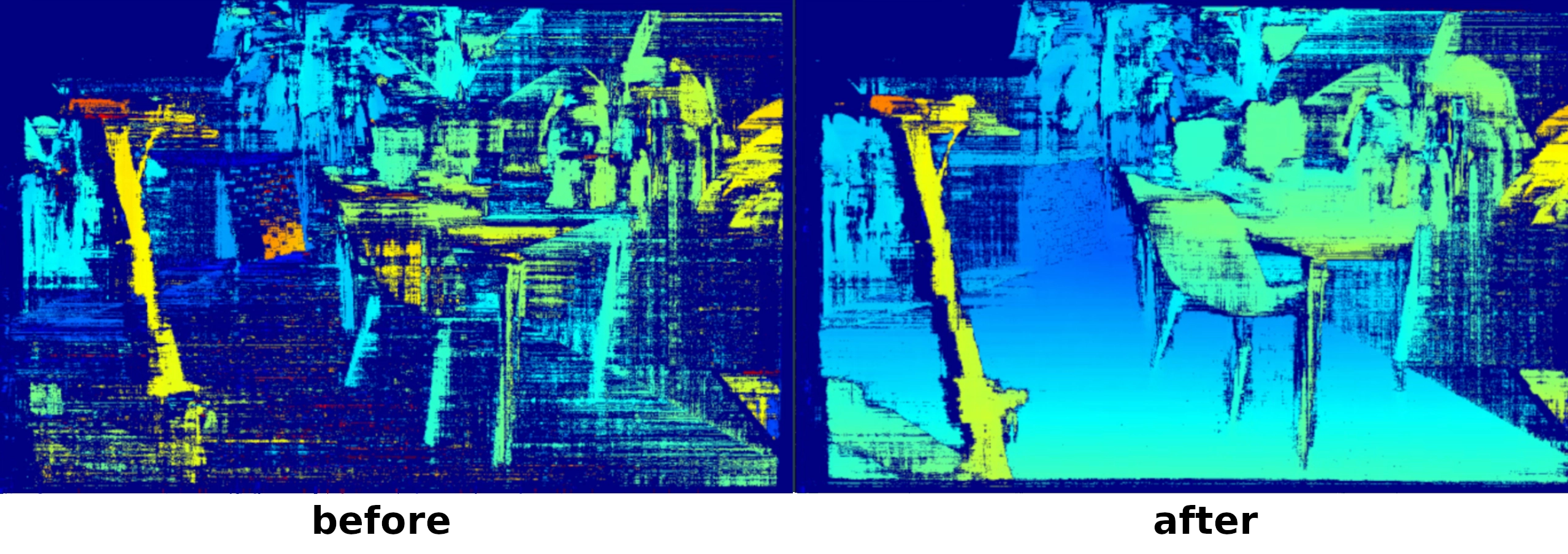
- 恢复深度性能 — 使您的视差图恢复清晰、几何一致的输出。
- 连续或手动操作 — 实时工作或通过手动触发。
- 校准健康状况监控 — 在不修改设备的情况下检查对齐漂移。
- 快速、稳健的重新校准 — 通常使用实时立体输入在几秒钟内完成。
- 无需特殊目标 — 在具有丰富视觉内容的自然场景中运行。
- 支持所有运行 DepthAI 3.0 的立体摄像头 — 包括 OAK-D、OAK-D-Lite、OAK-D Pro、CM4 PoE 等。
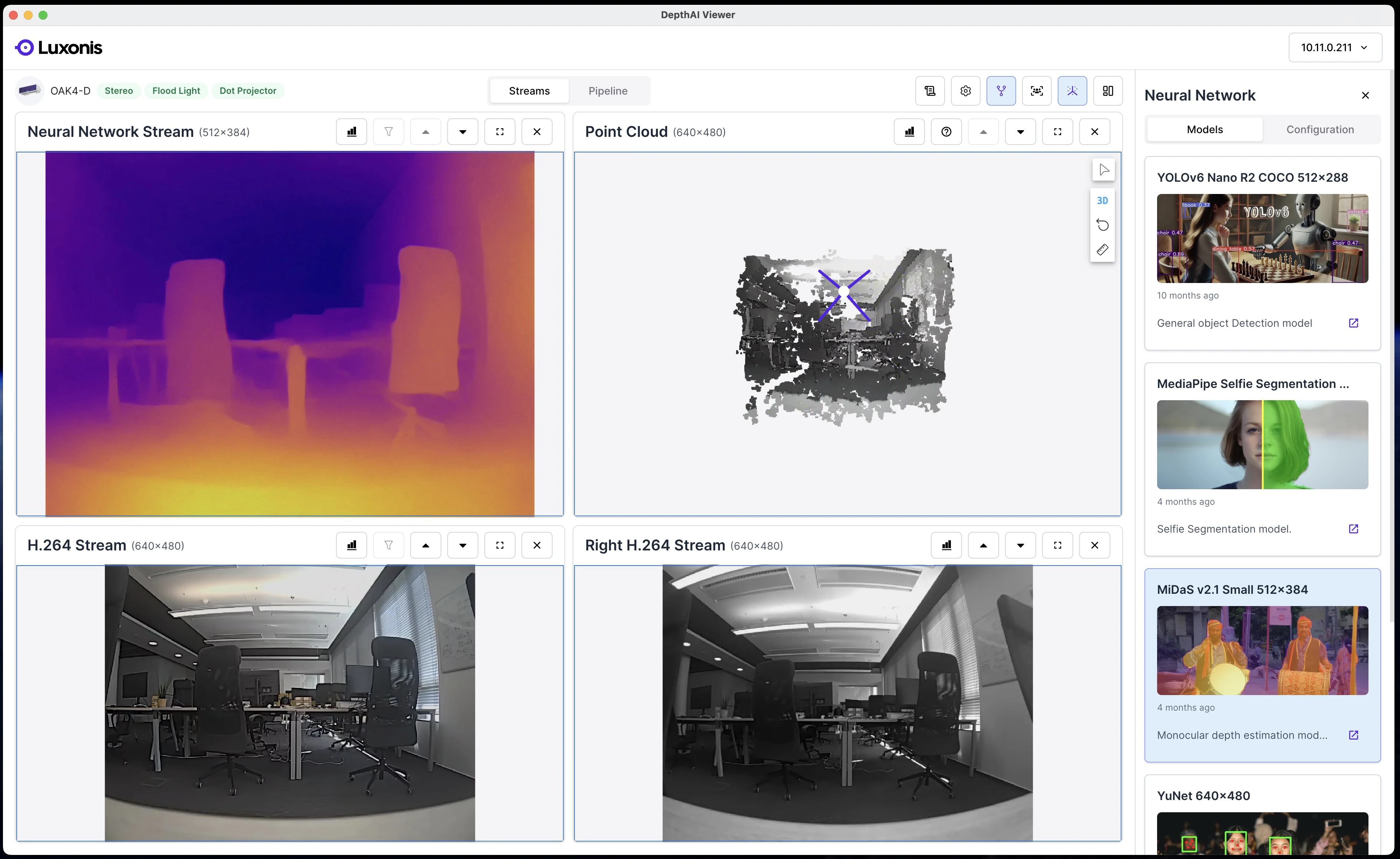
在 OAK Viewer 中试用(无需编码)
自动校准流程
ON_START 和 CONTINUOUS
- 在正常操作之前,使用
ON_START自动启动 DCL。 - 使用
CONTINUOUS在运行时保持 DCL 运行,以进行持续的自我修复。 - 在您的应用程序流程中无需手动触发 DCL。
- 在启动和长期运行的部署中都有更好的机会获得稳定的校准。
场景指南
- 包含不同深度的纹理对象。
- 避免空白墙壁或无特征的表面。
- 缓慢移动相机以覆盖整个视场;避免突然的动作。
| 建议 | 原始图像 vs. 特征覆盖(绿色部分) |
|---|---|
| ✅确保丰富的纹理和视觉细节 - 丰富的纹理、边缘和均匀分布在整个视场中的对象可创建理想的校准条件 |  |
| 🚫避免平坦或无特征的表面 - 缺乏纹理表面或视觉上可区分的对象提供的可用特征很少 |  |
| 🚫避免反光和透明表面 - 反光和透明表面会产生错误的 3D 特征 |  |
| 🚫避免黑暗场景 - 低对比度、阴影和光线不足的场景产生的可检测特征很少 |  |
| 🚫避免重复图案 - 许多图案区域看起来太相似而无法区分 |  |
开发人员集成
克隆并运行示例
Command Line
1git clone https://github.com/luxonis/depthai-core.git
2cd depthai-core/
3python3 -m venv venv
4source venv/bin/activate
5python3 examples/python/install_requirements.py
6python3 examples/python/DynamicCalibration/calibration_integration.py