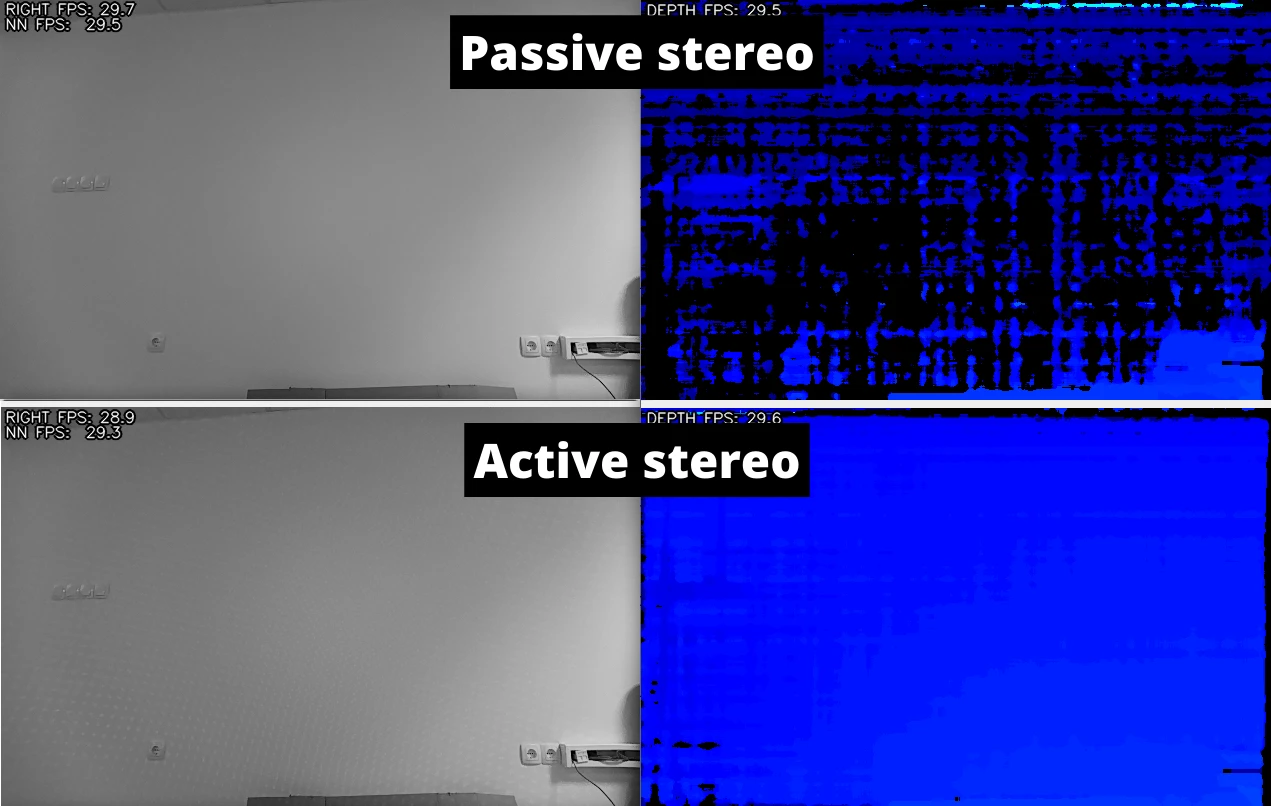
深度感知View as Markdown深度感知是 DepthAI 平台的一项关键功能,它支持不同的深度感知方法:被动立体深度 - 由 OAK-D 和 OAK4-D 相机的非 Pro 版本使用。主动立体深度 - 由 OAK 相机的 Pro 版本使用。飞行时间深度 - 由 OAK-ToF 使用。被动立体深度被动立体的工作原理与人类视觉类似。我们的大脑根据左右眼感知差异来估算物体的深度。在 OAK-D 相机中,立体相机对(左单目相机和右单目相机)执行类似的功能。OAK 相机的 VPU(视觉处理单元)进行视差匹配以估算深度。视差是立体相机对的左图像和右图像中同一像素点之间的像素距离。OAK-D 相机计算单目帧中每个像素的视差,并分配具有一定置信度的视差值。此过程发生在 StereoDepth 节点内部。深度图是使用 此公式 从视差图中计算得出的。被动立体深度感知在处理墙壁或天花板等无特征表面时可能效果不佳,因为视差匹配依赖于独特的点或特征。主动立体可以解决纹理和光照问题��。影响被动立体精度/平滑度的因素:**光照/纹理:**立体深度依赖于特征匹配,这在光线不足或无特征的表面上可能具有挑战性。主动立体可以解决纹理和光照问题。**校准:**出厂校准通常是最佳的。**后处理滤波器:**更多信息可在此处(在“深度滤波器”下)找到。也可以在主机端执行额外的过滤,例如 WLS 滤波器。主动立体深度OAK Pro 相机使用传统的有源立体视觉(ASV)。点投影仪在设备前方投射许多小点,有助于视差匹配,尤其是在视觉兴趣点较少的表面上。立体匹配过程与被动立体相同,但这些点提高了精度。上图显示了在墙壁上的被动和主动立体感知。单目图像(左下角)显示了投影的点。飞行时间深度虽然立体感知成本效益高且适用于远距离,但可能缺乏精度。对于高精度应用,建议使用飞行时间(ToF)。ToF 可以提供亚厘米级的深度精度。我们开发了与 OAK-FFC 兼容的 ToF FFC 模块。未来计划推出带板载 ToF 传感器的独立相机。上面的 GIF 演示了使用 ToF FFC 模块和彩色相机生成的高精度点云。此处的 ToF 分辨率为 244x172。