Robotics Vision Core 3 (RVC3)
- DepthAI features that are fine-tuned for the particular SoC
- A performant SoC and all its support circuitry (HS PCB layout, power delivery network, efficient heat dissipation, etc.)
- Out-of-the-box connectivity with Luxonis Hub - our cloud platform, which allows for an end-to-end integration of the perception stack.
RVC3-based devices
- RAE - Desktop robot for evaluation of DepthAI and rapid prototyping of robotics applications
- OAK-FFC 6P - A modular camera kit great for prototyping
State of the RVC3
- ResNet50 (classification) FPS - RVC2: 29, RVC3: 114, marking almost a 400% increase. For comparison, RVC4 achieves 934 FPS for ResNet50.
- Yolov5N (object detection) FPS - RVC2: 40, RVC3: 6, showing an approximately 85% decrease in FPS.
- Yolov6N (object detection) FPS - RVC2: 60, RVC3: 47, a mere 20% decrease.
RVC3 Performance
- 3.0 TOPS for AI with INT8 quantization support
- Quad-core ARM A53 @ 1.5GHz, running Yocto Linux, acting as a host computer
- Imaging: ISP, max 6 cameras, 500 MP/s HDR, 3A
- Run any AI model, even custom-architectured/built ones - models need to be converted.
- Cloud platform - The Luxonis Hub - connectivity out-of-the-box
- On-device SLAM / VIO support
- Encoding: H.264, H.265, MJPEG - 4K/75FPS, Decoding: 4K/60FPS
- Computer vision: warp/dewarp, resize, crop via ImageManip node, edge detection, feature tracking. You can also run custom CV functions
- Object tracking: 2D and 3D tracking with ObjectTracker node
RVC3 compared to RVC2
- Integrated quad-core ARM A53 running YOCTO Linux (details)
- Enhanced stereo depth perception (details)
- NN INT8 quantization support (details)
Quad-core ARM
Custom applications
SLAM / VIO
Stereo Depth
NN quantization
RVC3 Specifications
| Specification | Value |
|---|---|
| nominal VPU clock | 500 MHz |
| ResNet-50 performance | 240 inferences per second |
| AI TOPS | 3.0 TOPS |
| SHAVE processors | 12 |
| Computer Vision | CV/Warp acceleration at 1.0 GB/s. 6DOF motion mask support |
| Stereo depth | 720P resolution at 180 FPS |
| Video encoding | Max 4K 75FPS. H.264, H.265 and JPEG codecs |
| Video decoding | Max 4K 60FPS, max 10 channels of 1080P/30FPS. H.264, H.265 and JPEG codecs |
| Imaging | ISP, Max 6 cameras, 500 MP/s HDR, TNF, 3A, ULL. 4K/60FPS support |
| Interfaces | Multiple I2C, Quad-SPI, I2S, UART, PCIe Gen4 interfaces, USB 3.1/2, 1GB ethernet, many GPIOs |
| Operating temperature | -40°C to 105°C (same as RVC2) |
| RAM support | 2x 32-bit DRAM at 1600-2133 MHz |
Native media support
- GStreamer framework
- OpenCV (or G-API) for computer vision
- Video Acceleration API / Intel Media SDK for encoding and decoding
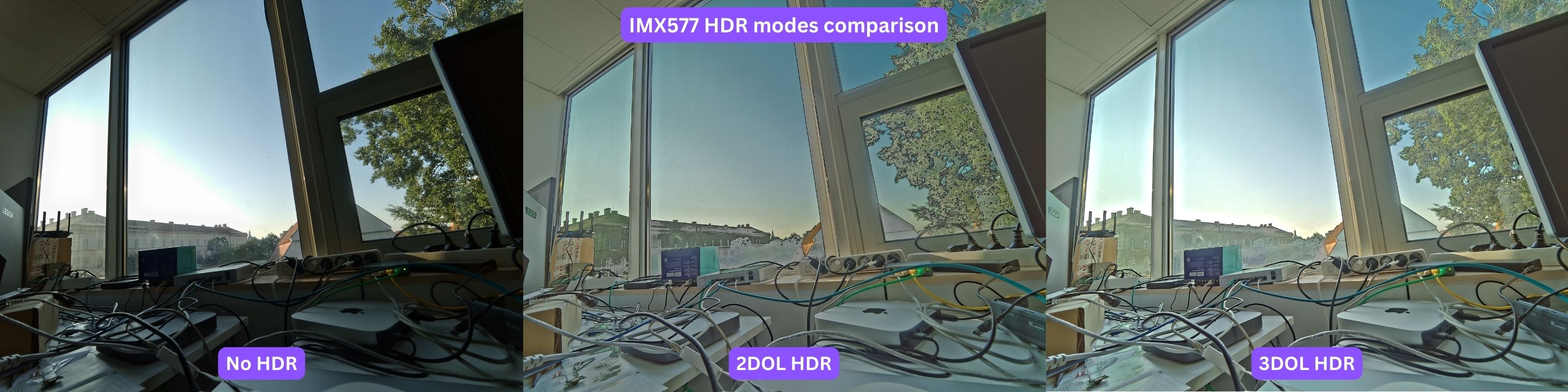
RVC3 HDR support
- IMX412 driver (that we reuse for IMX577/IMX477 as well), requires 12MP resolution and 4 MIPI lanes
- IMX327 driver (that we reuse for IMX462), requires 1080P and 4 MIPI lanes
Python
1colorCam1.initialControl.setMisc("camera-mode", "HDR-2DOL")
2# or, for 3DOL:
3colorCam2.initialControl.setMisc("camera-mode", "HDR-3DOL")
4# Note that 3DOL is only suited for static scenes