Robotics Vision Core 3 (RVC3)
- 针对特定 SoC 进行了优化的 DepthAI 功能
- 高性能 SoC 及其所有支持电路(HS PCB 布局、电源输送网络、高效散热等)
- 开箱即用的 与 Luxonis Hub 的连接 - 我们的云平台,可实现感知栈的端到端集成。
基于 RVC3 的设备
- RAE - 用于评估 DepthAI 和快速原型设计机器人应用的桌面机器人
- OAK-FFC 6P - 一个模块化相机套件,非常适合原型设计
RVC3 的现状
- ResNet50(分类)FPS - RVC2:29,RVC3:114,增长了近 400%。相比之下,RVC4 的 ResNet50 FPS 为 934。
- Yolov5N(目标检测)FPS - RVC2:40,RVC3:6,FPS 下降了约 85%。
- Yolov6N(目标检测)FPS - RVC2:60,RVC3:47,仅下降了 20%。
RVC3 性能
- 3.0 TOPS 的 AI 性能,支持 INT8 量化支持
- 四核 ARM A53 @ 1.5GHz,运行 Yocto Linux,可作为主机计算机使用
- 成像: ISP,最多支持 6 个摄像头,500 MP/s HDR,3A
- 运行任何 AI 模型,包括自定义架构/构建的模型 - 模型需要转换。
- 云平台 - Luxonis Hub - 开箱即用的连接性
- 设备端支持 SLAM / VIO
- 编码: H.264, H.265, MJPEG - 4K/75FPS,解码: 4K/60FPS
- 计算机视觉: 通过 ImageManip 节点进行图像校正/去畸变、缩放、裁剪,边缘检测,特征跟踪。您还可以 在设备上运行自定义 CV 函数
- 对象跟踪: 使用 ObjectTracker 节点进行 2D 和 3D 跟踪
RVC3 与 RVC2 对比
四核 ARM
自定义应用程序
SLAM / VIO
立体深度
NN 量化
RVC3 规格
| 规格 | 值 |
|---|---|
| 标称 VPU 时钟 | 500 MHz |
| ResNet-50 性能 | 每秒 240 次推理 |
| AI TOPS | 3.0 TOPS |
| SHAVE 处理器 | 12 |
| 计算机视觉 | CV/Warp 加速,速度为 1.0 GB/s。支持 6DOF 运动掩码 |
| 立体深度 | 720P 分辨率,180 FPS |
| 视频编码 | 最高 4K 75FPS。H.264、H.265 和 JPEG 编解码器 |
| 视频解码 | 最高 4K 60FPS,最多 10 个 1080P/30FPS 通道。H.264、H.265 和 JPEG 编解码器 |
| 成像 | ISP,最多 6 个摄像头,500 MP/s HDR,TNF,3A,ULL。支持 4K/60FPS |
| 接口 | 多个 I2C、Quad-SPI、I2S、UART、PCIe Gen4 接口、USB 3.1/2、1GB 以太网、多个 GPIO |
| 工作温度 | -40°C 至 105°C(与 RVC2 相同) |
| RAM 支持 | 2x 32 位 DRAM,频率为 1600-2133 MHz |
原生媒体支持
- GStreamer 框架
- OpenCV(或 G-API)用于计算机视觉
- Video Acceleration API / Intel Media SDK 用于编码和解码
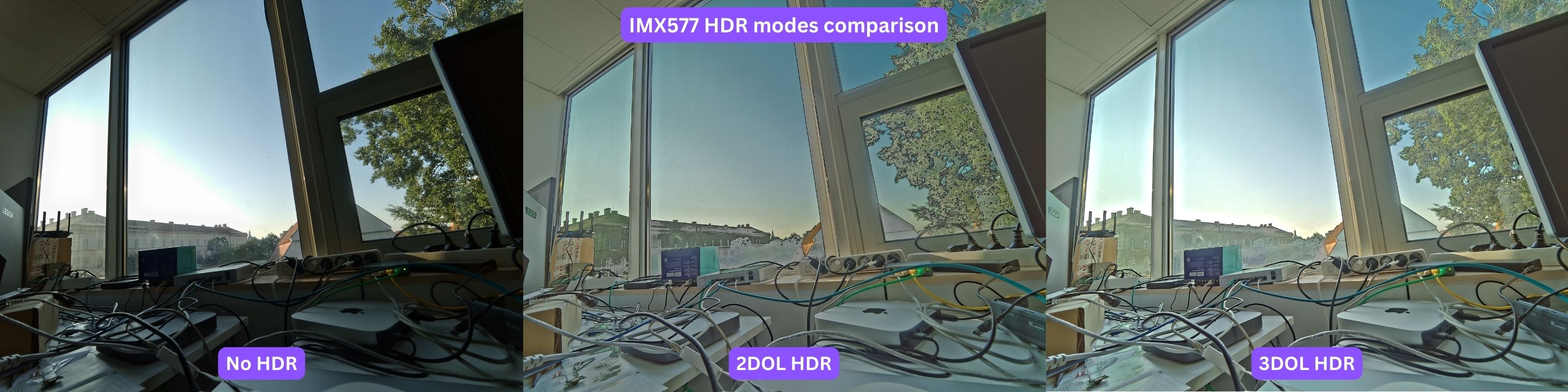
RVC3 HDR 支持
- IMX412 驱动程序(我们也将其用于 IMX577/IMX477),需要 12MP 分辨率和 4 个 MIPI 通道
- IMX327 驱动程序(我们也将其用于 IMX462),需要 1080P 和 4 个 MIPI 通道
Python
1colorCam1.initialControl.setMisc("camera-mode", "HDR-2DOL")
2# 或者,对于 3DOL:
3colorCam2.initialControl.setMisc("camera-mode", "HDR-3DOL")
4# 请注意,3DOL 仅适用于静态场景