快门类型
- 卷帘快门 - 图像通过从上到下扫描图像来捕获。这意味着图像不是一次性捕获的,而是逐行捕获的。 当相机或物体移动时,这可能会导致图像失真(果冻效应)。卷帘快门传感器可以具有更高的分辨率而成本不会太高。
- 全局快门 - 图像一次性捕获。这意味着整个图像在同一时间被捕获,从而消除了果冻效应。 全局快门传感器通常在更高分辨率(1MP 以上)下成本要高得多,这就是为什么我们当前支持的最高全局快门传感器为 2.3MP(AR0234)。
卷帘快门
卷帘快门传感器时序
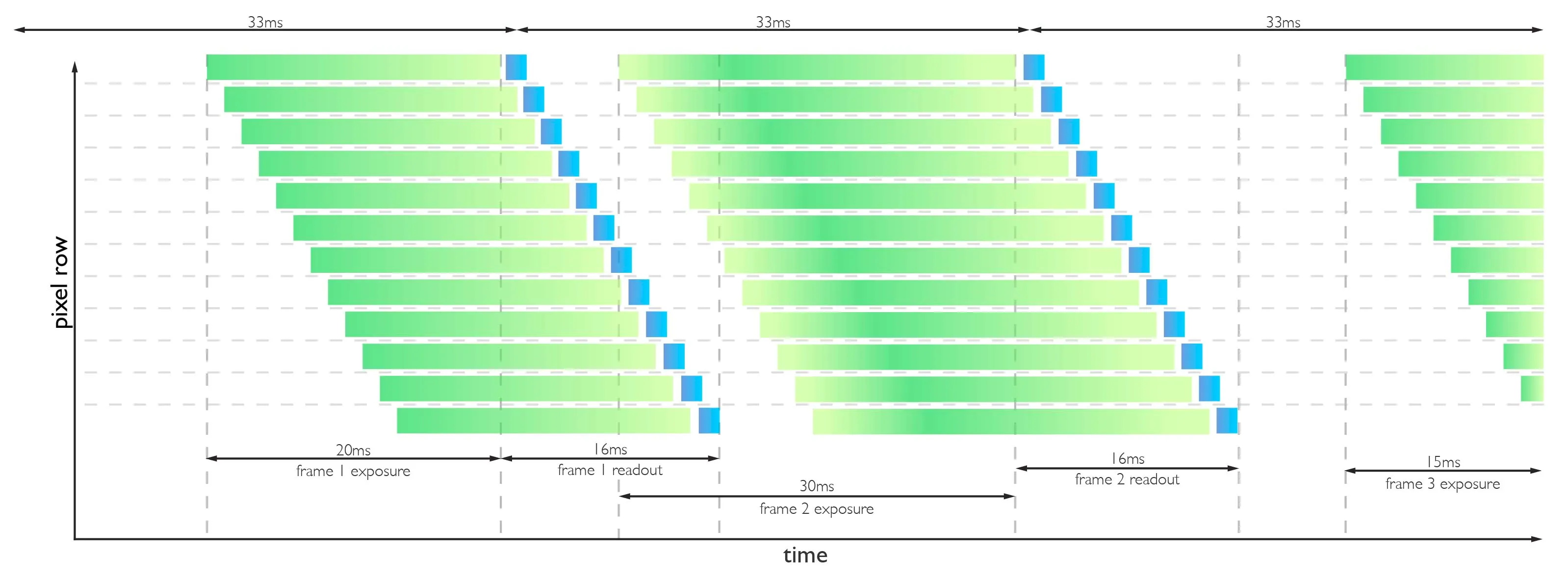
row_time = 1 / (maxFps * rows) 来估算它。因此,对于 IMX378 @ 1080P,它将是 row_time = 1/(60 * 1080) = 15.4us。下面的动画显示了在捕获移动物体时使用卷帘快门的缺点。卷帘快门传感器时序
估算果冻效应
- 物体速度
- 物体大小
- 使用的分辨率
Python
1obj_speed = 0.364 # [fov%/sec]
2obj_height = 0.1 # [%] FOV 中的物体高度
3width_pix, height_pix = 1920, 1080 # [pix] 1080P 分辨率
4row_time = 1 / (60 * height_pix) # 15.4 微秒
5
6obj_speed_pix = obj_speed * width_pix # 1920 像素/秒的移动
7shift_per_row = obj_speed_pix * row_time # 0.0148[像素/行] 的偏移
8
9# 行数,FOV 的 10% => 108 行 * 偏移
10total_shift = obj_height * height_pix * shift_per_row
11print('物体偏移:', total_shift, '像素') # -> 物体偏移: 1.16 像素
12print('相对物体偏移', total_shift / width_pix * 100, '%') # -> 0.06 %
13
14width_pix, height_pix = 3840, 2160 # [pix] 4K 分辨率
15obj_speed_pix = obj_speed * width_pix
16row_time = 1 / (30 * height_pix) # 15.4 微秒,与 1080P 相同
17shift_per_row = obj_speed_pix * row_time
18total_shift = obj_height * height_pix * shift_per_row
19print('物体偏移:', total_shift, '像素') # -> 物体偏移: 4.66 像素
20# 相对物体偏移
21print(total_shift / width_pix * 100, '%') # -> 0.12%全局快门
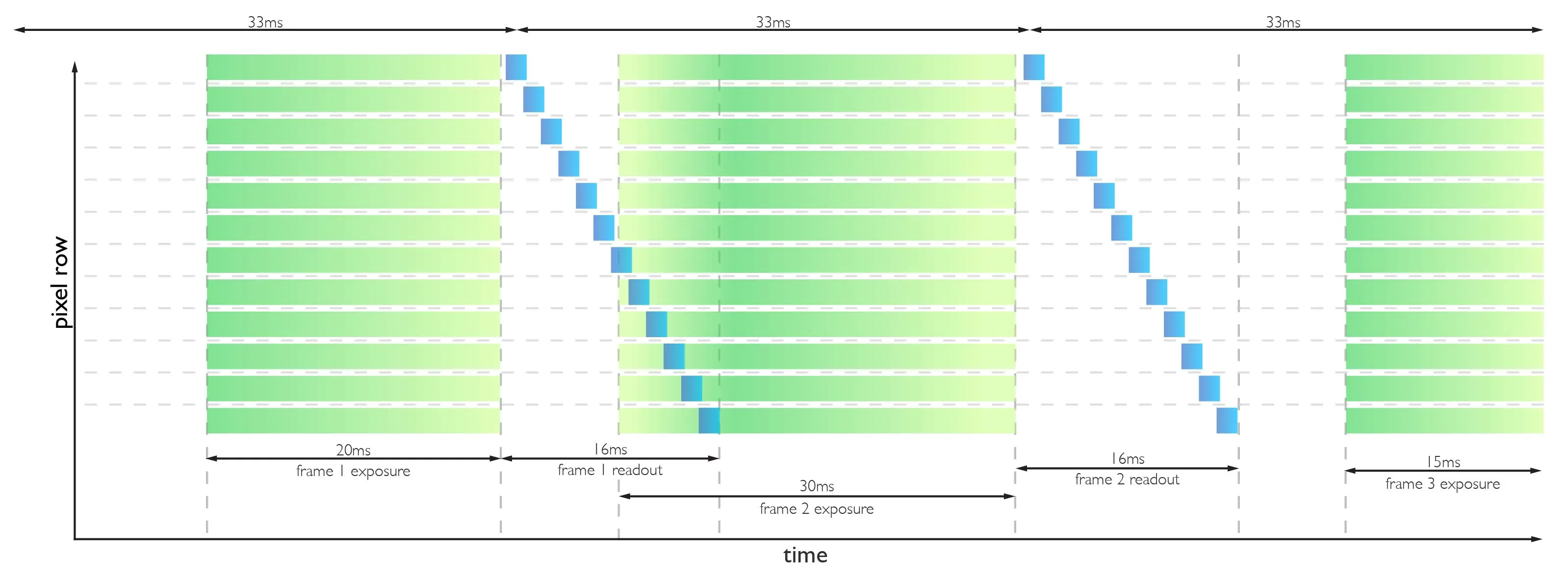
全局快门传感器时序
卷帘快门传感器时序
