图像质量
- 更改 彩色相机 ISP 配置
- 尝试保持相机灵敏度较低 - 低光增加灵敏度
- 使用自定义调优文件进行 相机调优
- 减少 运动模糊 效果的方法
彩色相机 ISP 配置
sharpness(锐度)、luma denoise(亮度降噪)和 chroma denoise(色度降噪),这些值 可以提高 IQ。我们注意到,有时这些值会提供更好的结果:Python
1camRgb = pipeline.create(dai.node.ColorCamera)
2camRgb.initialControl.setSharpness(0) # 范围:0..4,默认值:1
3camRgb.initialControl.setLumaDenoise(0) # 范围:0..4,默认值:1
4camRgb.initialControl.setChromaDenoise(4) # 范围:0..4,默认值:1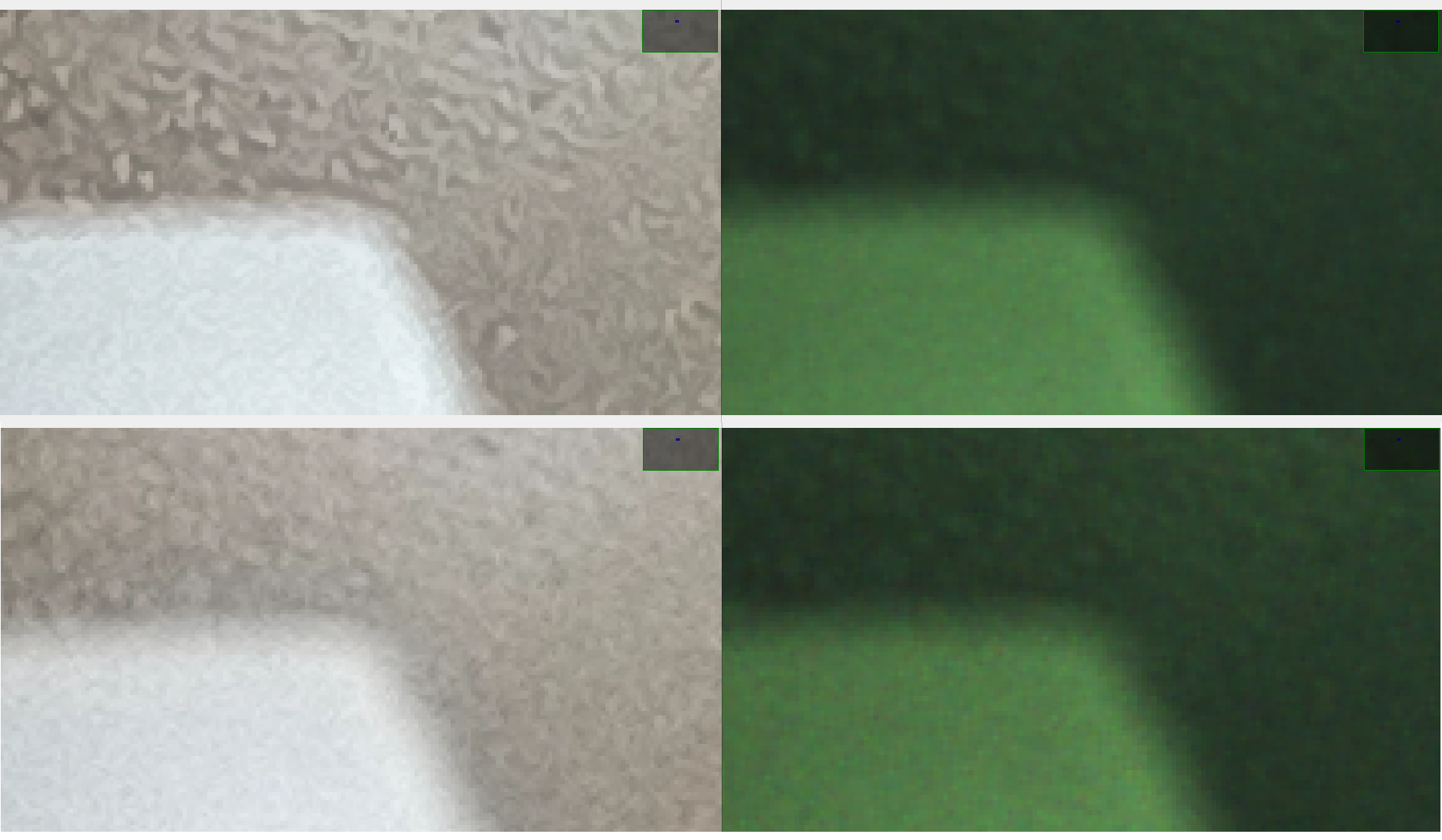
低光增加灵敏度

相机调优
Py
1import depthai as dai
2
3pipeline = dai.Pipeline()
4pipeline.setCameraTuningBlobPath('/path/to/tuning.bin')- 因此,大多数人只能使用预调优的文件。当前可用的调优文件:
- 用于弱光环境的单声道调优 在此处。这允许自动曝光达到 200ms(否则默认调优限制为 33ms)。对于 200ms 自动曝光,您还需要限制 FPS(
monoRight.setFps(5)) - 用于弱光环境的彩色调优 在此处。比较如下。这允许自动曝光达到 100ms(否则默认调优限制为 33ms)。对于 200ms 自动曝光,您还需要限制 FPS(
rgbCam.setFps(10))。已知限制:当自动曝光超过 33ms 时可能会出现闪烁,这是�由连续模式下的自动对焦引起的。一种解决方法是从 CONTINUOUS_VIDEO(默认)更改为 AUTO(仅在初始化时和后续对焦触发命令时进行对焦):camRgb.initialControl.setAutoFocusMode(dai.CameraControl.AutoFocusMode.AUTO) - 用于阳光环境的 OV9782 广角 FOV 彩色调优 在此处。修复了阳光直射下的镜头颜色过滤问题,请参阅博客文章。它还改进了 LSC(镜头阴影校正)。目前不适用于 OV9282,因此当在例如 Series 2 OAK 上使用广角 FOV 相机时,不应启用单声道相机。
- 相机曝光限制:最大 500us,最大 8300us。这些调优文件将限制最大曝光时间,并在达到最大曝光时间后开始增加 ISO(灵敏度)。这是一种减少 运动模糊 的有用方法。

运动模糊
卷帘快门传感器时序

- 提供更好的(更亮的)照明,这将使相机使用更短的曝光时间,从而减少运动模糊。
- 限制快门(曝光)时间 - 这将减少运动模糊,但也会减少到达传感器的光线,因此图像会变暗。您可以选择使用更大的传感器(以便更多光子击中传感器)或使用更高的 ISO(灵敏度)值。限制最大曝光时间的一种方法是使用 相机调优 blob。
Py
1camRgb = pipeline.create(dai.node.ColorCamera)
2# 最大曝光限制(微秒)。在此时间后,将提高 ISO 而不是曝光。
3camRgb.initialControl.setAutoExposureLimit(10000) # 最长 10 毫秒- 如果运动模糊对模型的准确性产生负面影响,您可以通过在训练数据集中包含运动模糊图像来对其进行微调,使其对运动模糊更具鲁棒性。
高动态范围 (HDR) 成像
支持的设备
QBC HDR
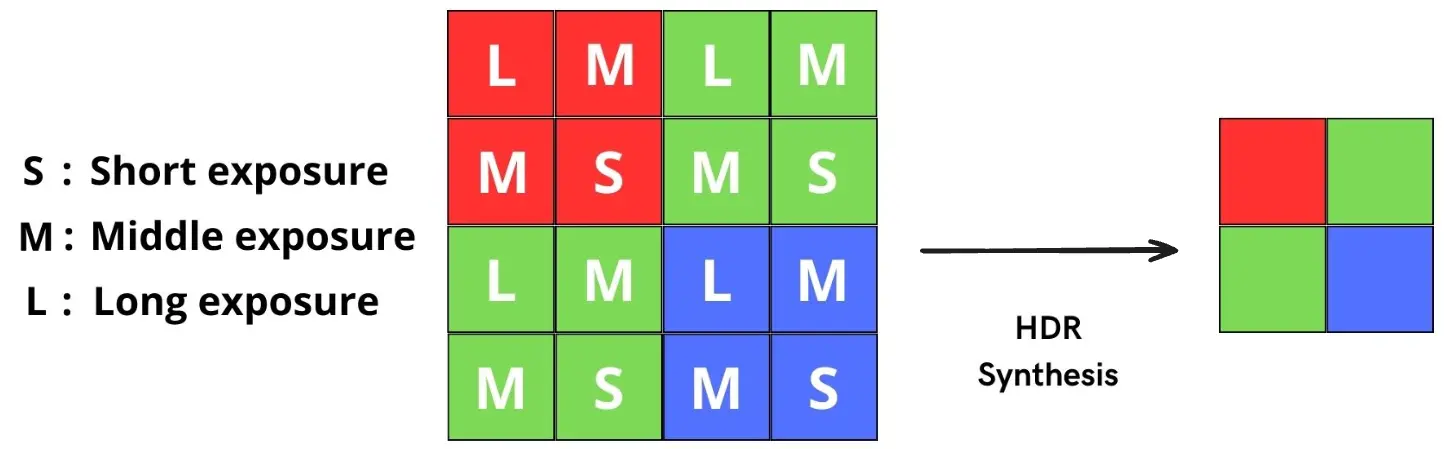
ℹ️ 注意:由于曝光在具有不同持续时间的 2×2 四拜耳像素结构上并行发生,因此在快速移动的场景中可能会出现一些运动伪影。
配置 HDR 控件
Python
1colorCam.initialControl.setMisc("hdr-exposure-ratio", 4) # 设置为 > 1 时启用 HDR(选项:2、4、8)
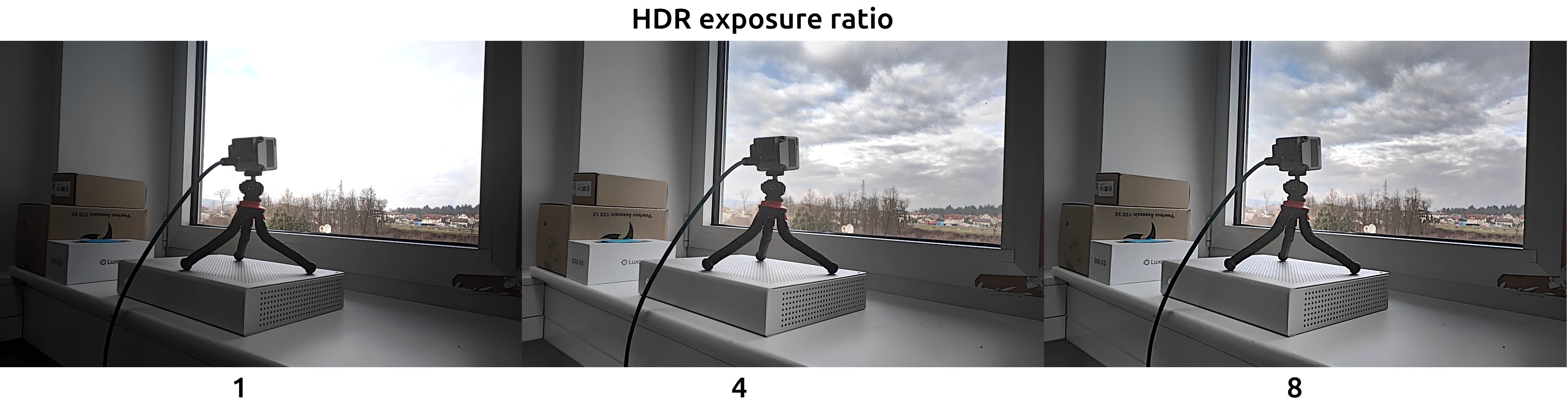
2colorCam.initialControl.setMisc("hdr-local-tone-weight", 75) # 范围:0..100曝光比
hdr-exposure-ratio 控制构成单个 HDR 图像的三个独立捕获的相对曝光时间:- 长曝光: 这是基本曝光时间,通常手动设置或通过自动曝光设置。
- 中曝光: 计算为
长曝光时间 / hdr-exposure-ratio。 - 短曝光: 计算为
长曝光时间 / (hdr-exposure-ratio * hdr-exposure-ratio)。
hdr-exposure-ratio 为 4 且长曝光为 100 毫秒时:- 长曝光: 100 毫秒
- 中曝光: 25 毫秒 (100 毫秒 / 4)
- 短曝光: 6.25 毫秒 (100 毫秒 / 16)
局部色调权重
hdr-local-tone-weight 有助于平衡亮度对比度调整如何在��整个图像中应用:- 局部色调映射: 调整小区域的亮度和对比度,以保留细节和纹理。
- 全局色调映射: 修改整个图像,使其看起来平衡且逼真。
hdr-local-tone-weight 值可以增强细节,但可能导致不自然的对比度。较低的值有助于图像看起来均匀,但可能会降低细节区域的清晰度。OAK-1 MaxHDR 对比
