IMU
- 跨平台使用的传感器
- 支持的输出系列
- IMU 与相机的对齐
- 工厂校准
- 噪声特性
所有 Kickstarter 预购的 OAK-D-Lite 相机均不带板载 IMU。
IMU 型号
BNO08X family
9-axis sensor hub used on RVC2 devices, including raw and fused orientation outputs.
BMI270
6-axis accelerometer + gyroscope IMU used on RVC2 platforms as a raw inertial sensor path.
LSM6DSV
6-axis RVC4 IMU with accelerometer, gyroscope, and internal derived outputs.
AK09919
3-axis RVC4 companion magnetometer used when magnetic reference is needed.
功能概述
| 传感器 | 轴数 | 物理传感器 | 磁力计 | 传感器端派生输出 | 传感器端绝对航向 |
|---|---|---|---|---|---|
| BNO08X | 9 | 加速度计、陀螺仪、磁力计 | 是 | 旋转矢量、游戏旋转矢量、地磁旋转矢量、重力、线性加速度 | 是 |
| BMI270 | 6 | 加速度计、陀螺仪 | 否 | 无作为传感器端融合定向输出暴露 | 否 |
| LSM6DSV | 6 | 加速度计、陀螺仪 | 否 | 游戏旋转矢量、重力矢量、陀螺仪偏差 | 否 |
| AK09919 | 3 | 磁力计 | 是 | 无 | 否 |
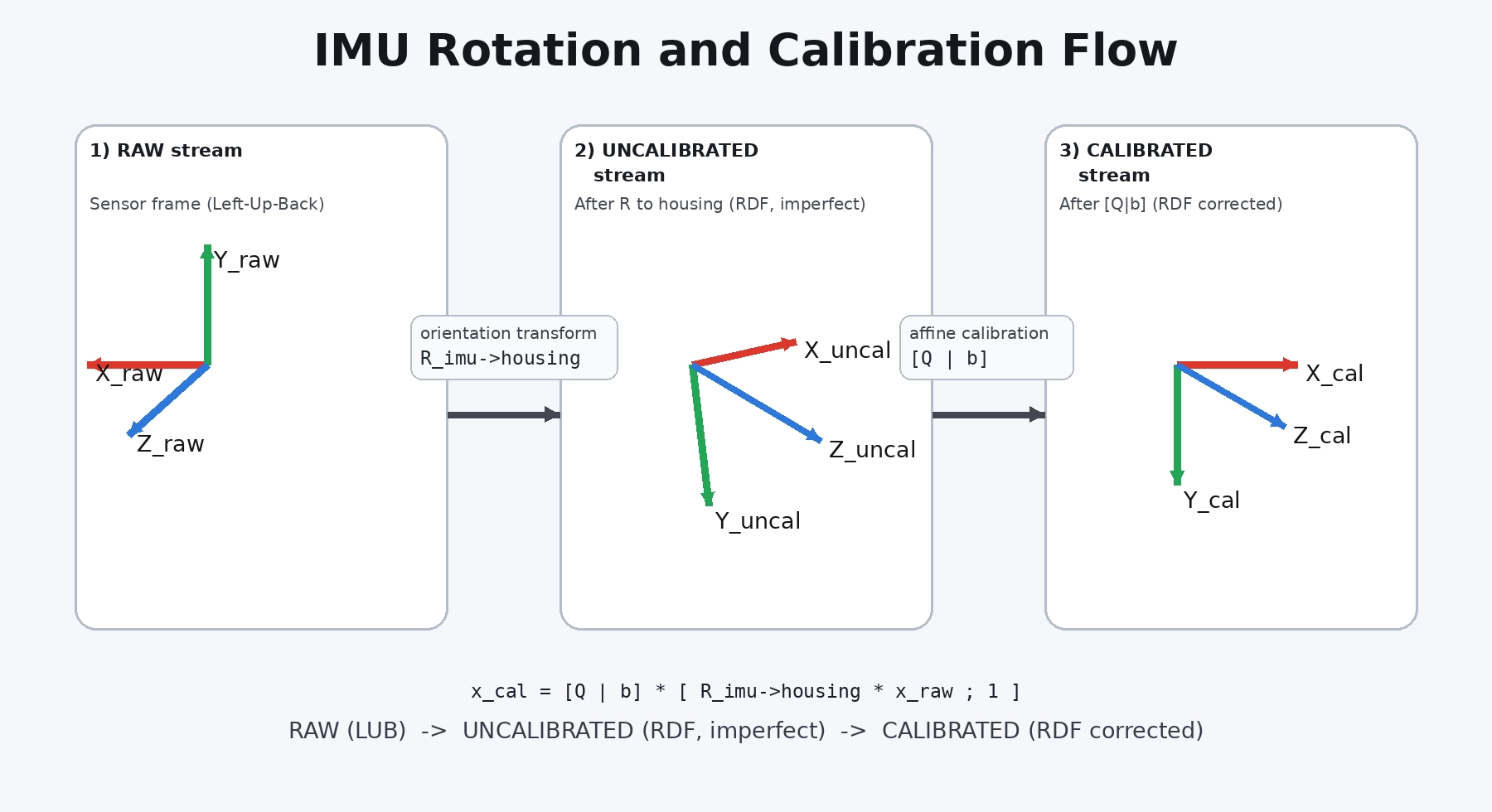
输出类型
原始数据
未校准
- +X 向右
- +Y 向下
- +Z 向前
已校准
- 旋转到 Luxonis RDF 坐标系
- 工厂内部校准项
- 对确定性传感器误差(如偏差、比例因子误差、剪切/交�叉轴项以及组装相关的缺陷,包括 IMU 与 PCB 之间微小的安装或焊接偏差)的补偿
传感器提供的派生输出
- 重力矢量
- 线性加速度 / 重力补偿加速度
- 旋转矢量 / 四元数输出
IMU 参考系
imuExtrinsics
imuExtrinsics 是 IMU 坐标系与相机坐标系之间的刚性变换。实际上:- 对于加速度和角速度等矢量,使用变换的旋转部分
- 对于完整的传感器几何,使用完整的 4x4 变换
imuExtrinsics 的旋转分量旋转到相机坐标系中。工厂 IMU 校准
- 偏差
- 比例因子误差
- 交叉轴/剪切项
- 组装相关的对齐缺陷
imuExtrinsics 不同:内部 IMU 校准校正传感器本身,而外部校准将 IMU 坐标系与相机坐标系关联起来。噪声特性
- VIO
- EKF / UKF 管道
- SLAM
- 仿真
- 协方差调优
- Kalibr 等工具
| 概念 | 常见 IMU / Allan 项 | Kalibr 名称 | Luxonis 文档名称 |
|---|---|---|---|
| 加速度计白噪声 | VRW | accelerometer_noise_density | accel_noise_density |
| 加速度计偏差漂移 | 偏差随机游走 | accelerometer_random_walk | accel_bias_random_walk |
| 加速度计偏差稳定性 | 偏差不稳定性 | - | accel_bias_instability |
| 陀螺仪白噪声 | ARW | gyroscope_noise_density | gyro_noise_density |
| 陀螺仪偏差漂移 | RRW / 偏差随机游走 | gyroscope_random_walk | gyro_bias_random_walk |
| 陀螺仪偏差稳定性 | 偏差不稳定性 | - | gyro_bias_instability |