
概述
| 设备组 | 设��备列表 | FSYNC 功能 | M8 上的 FSYNC 电压 |
| 较旧设备 | 仅支持来自函数发生器的外部 FSYNC 信号 | 10V-24V FSYNC 信号 | |
| 较新设备 | 支持来自函数发生器和其他 OAK 设备的外部 FSYNC 信号 | 5V FSYNC 信号 |
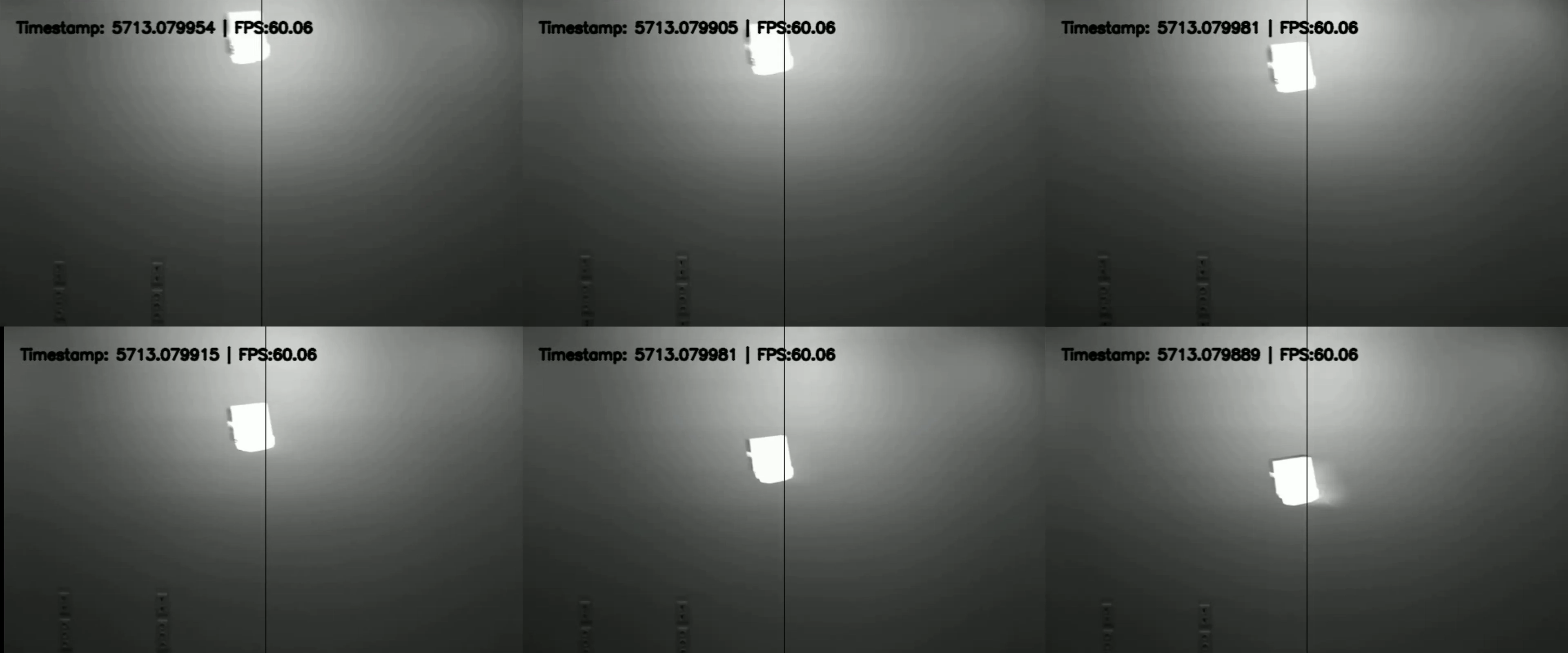
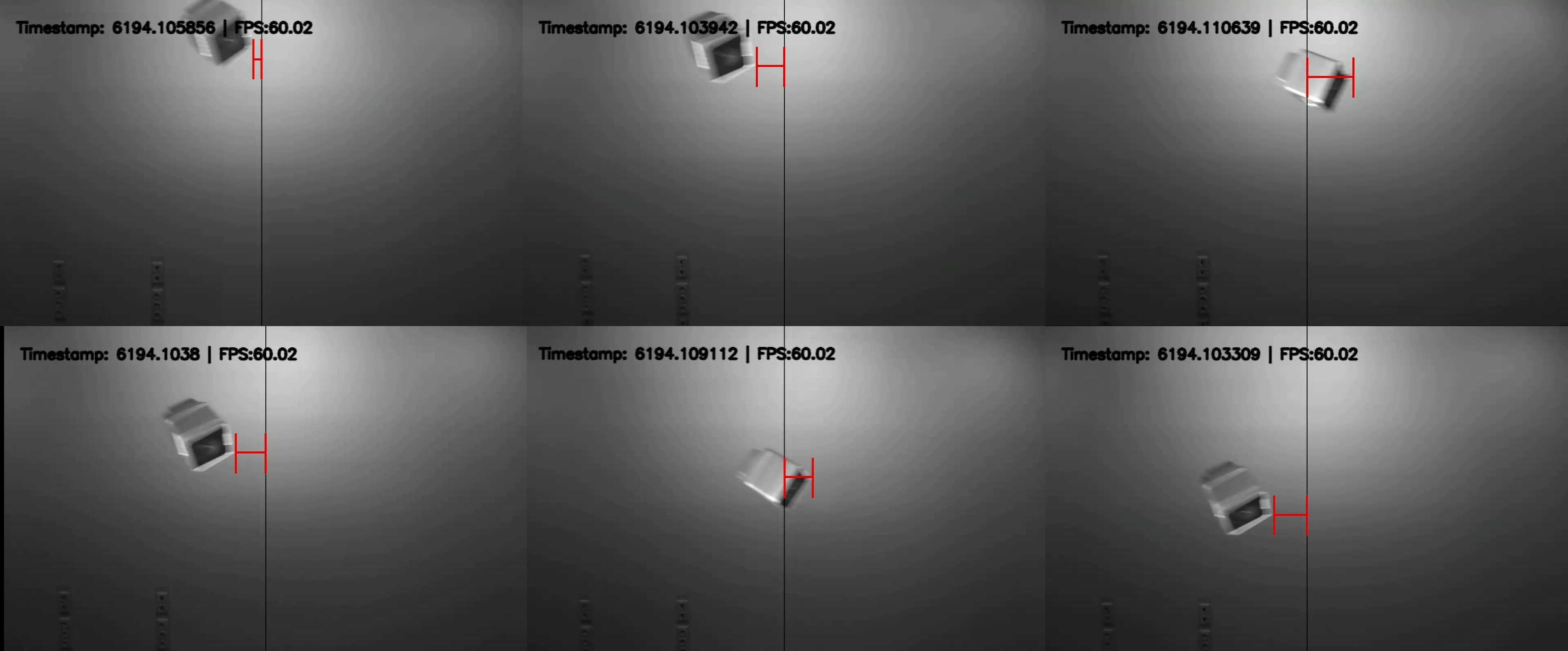
FSYNC 结果
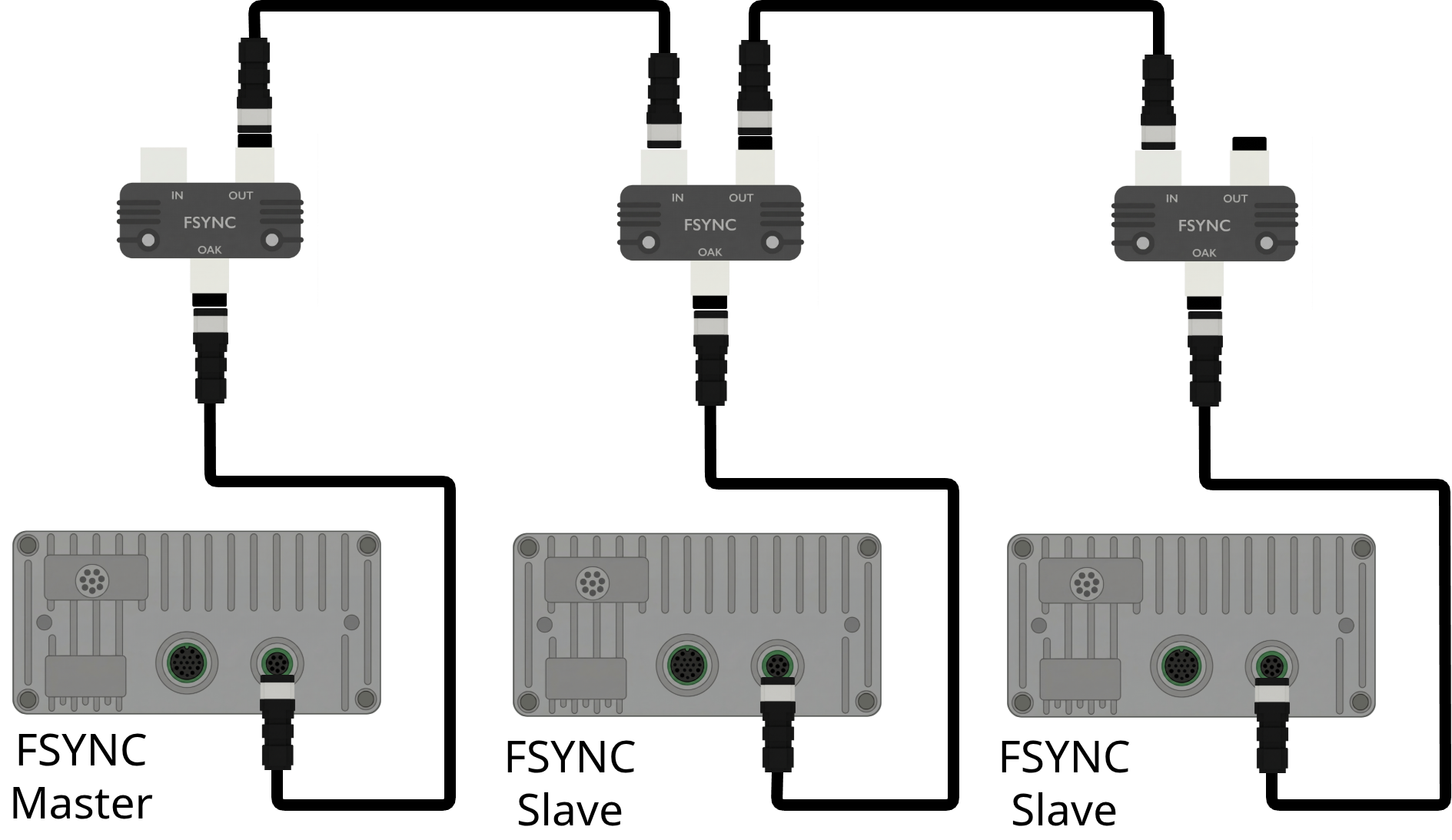
来自 OAK 设备的外部 FSYNC 信号
depthai 版本,在 OAK4 设备上,从 depthai 3.4.0 开始可用。代码
Python
1# 获取角色(MASTER / SLAVE)
2role = device.getExternalFrameSyncRole()
3
4# Master 定义 FPS,slaves 跟随
5cam = pipeline.create(dai.node.Camera).build(
6 socket,
7 sensorFps=fps if role == dai.ExternalFrameSyncRole.MASTER else None
8)
9
10# 创建 Sync 节点(在主机上运行)
11sync = pipeline.create(dai.node.Sync)
12sync.setRunOnHost(True)
13sync.setSyncThreshold(datetime.timedelta(milliseconds=1000 / (2 * fps)))
14
15# 将摄像头输出链接到 sync
16cam.requestOutput(...).link(sync.inputs["cam"])
17
18# 重要提示:先启动 master,然后启动 slaves
19master_pipeline.start()
20slave_pipeline.start()- 获取角色 →
getExternalFrameSyncRole() - 主设备设置 FPS,从设备不设置
- 在主机上使用 Sync 节点
- 将所有摄像头流链接到它
- 主管道必须在从设备之前启动
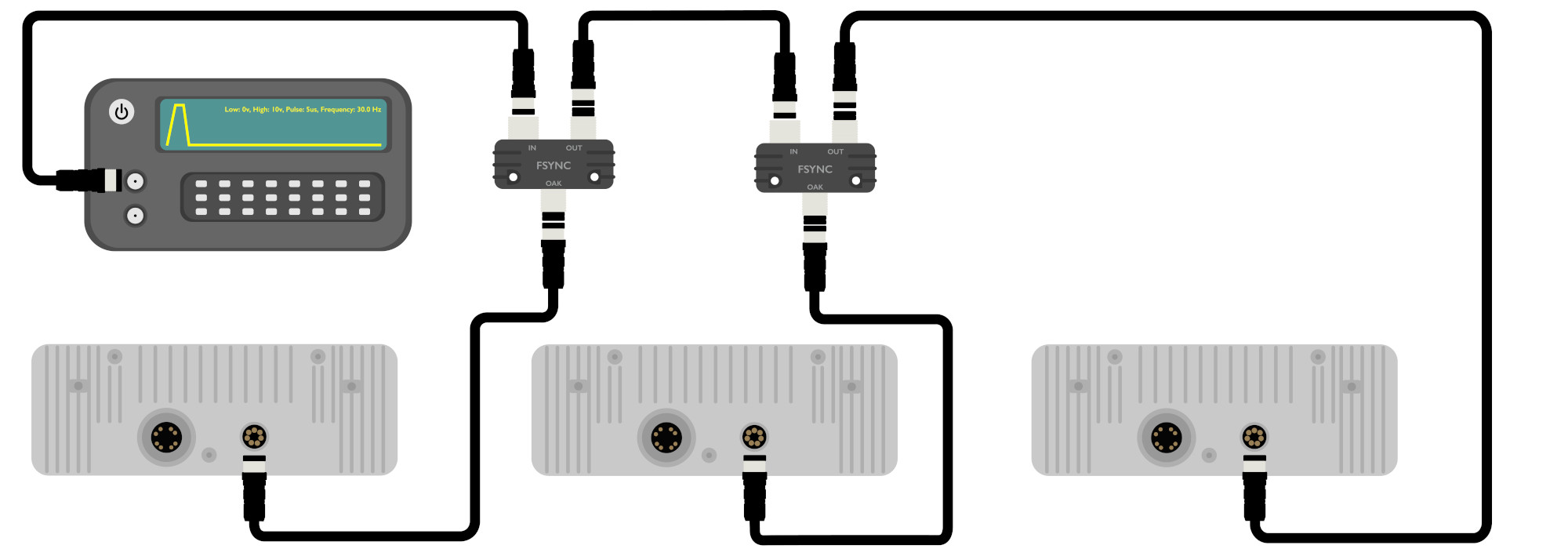
来自函数发生器的外部 FSYNC 信号
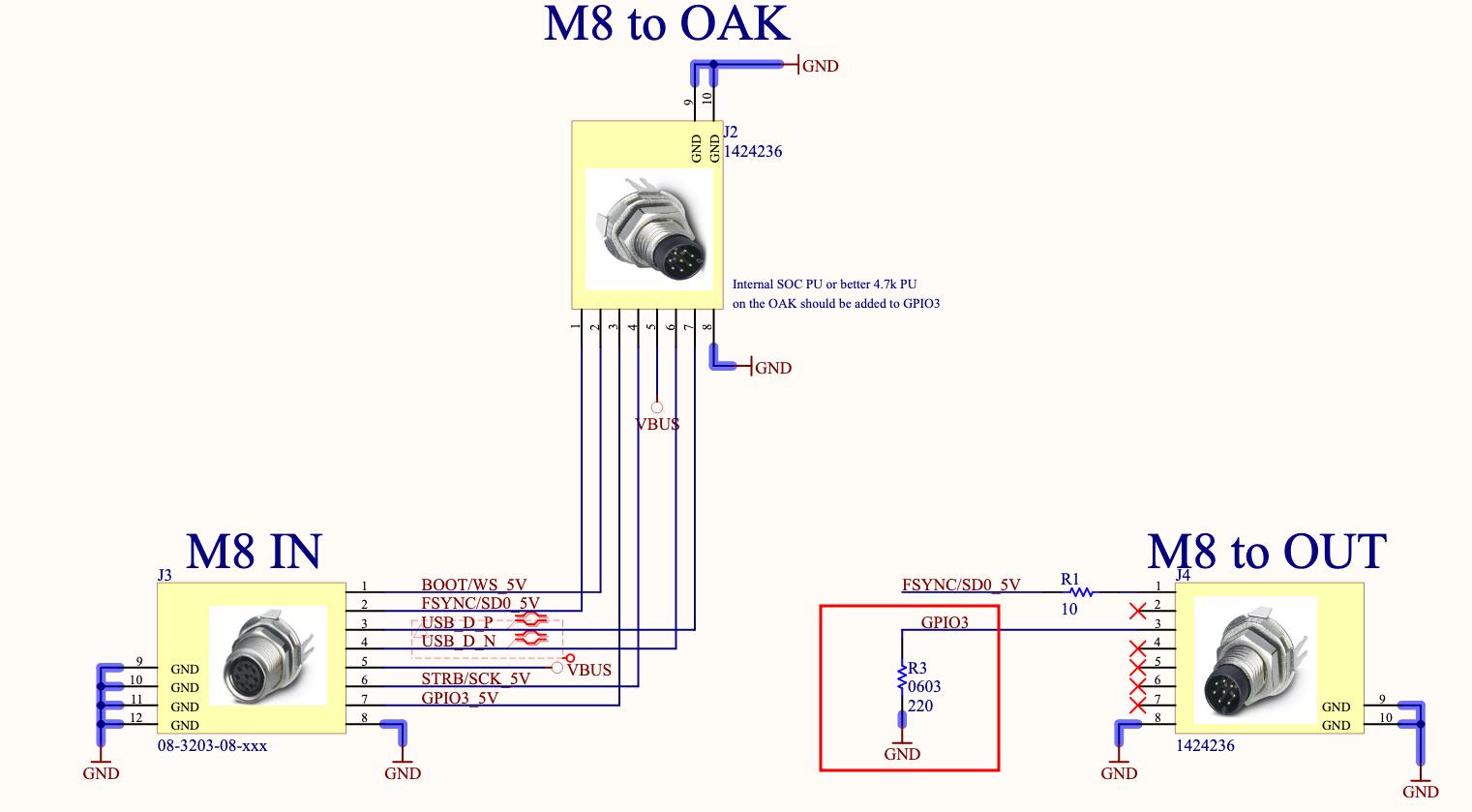
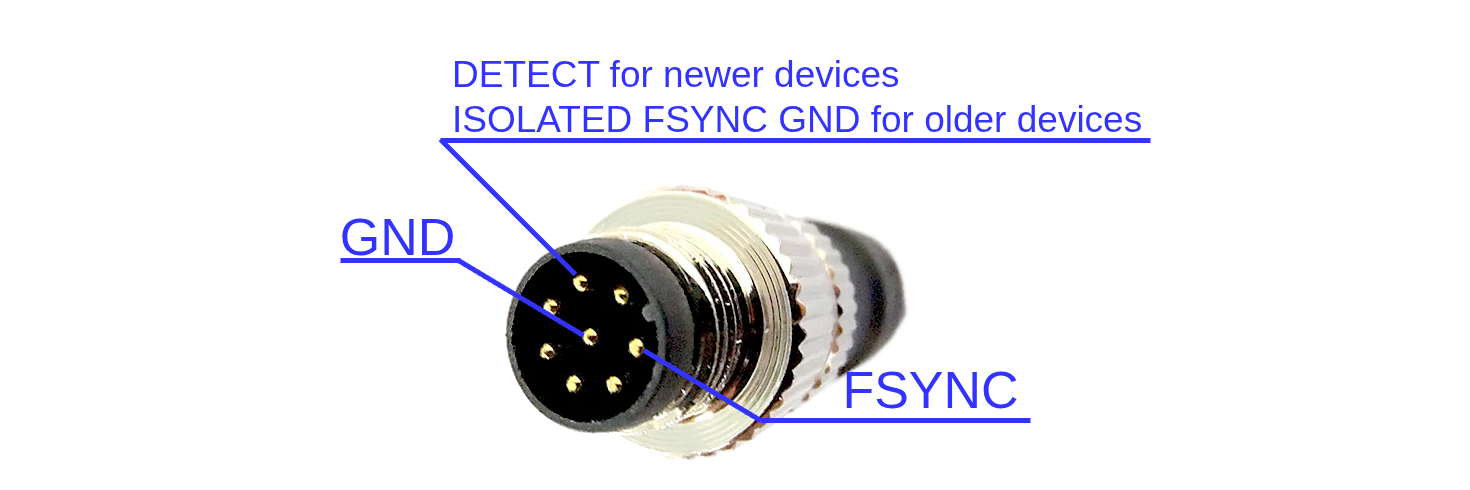
接线图

尺寸和重量
- 重量:5克
- 宽度:23.5 毫米
- 高度:33 毫米
- 长度:10 毫米