OAK-D Pro W PoE购买
基于
连接方式
以太网 1Gbps
点阵投射器
红外
是
IMU
是
传感器 1, 3 - OV9282
类型
黑白
DFOV / HFOV / VFOV
尺寸
1/4
快门类型
全局
对焦
定焦
传感器 2 - IMX378
类型
彩色
DFOV / HFOV / VFOV
尺寸
1/2.3
快门类型
卷帘
对焦
定焦

双目
广角视场角
红外投射器
需要更多细节?请访问 Platform -> Features 中的相关特性。
内置 RVC2
- 处理能力4 TOPS(AI为1.4 TOPS)- RVC2 NN 性能
- 运行任何 AI 模型,包括自定义架构/构建的模型 - 模型需要转换。
- 编码:H.264、H.265、MJPEG - 4K/30FPS、1080P/60FPS
- 计算机视觉:通过 ImageManip 节点进行变形/去畸变、缩放、裁剪,边缘检测、特征跟踪。您还可以 运行自定义 CV 函数
- 立体深度感知,支持过滤、后处理、RGB-深度对齐以及高可配置性
- 对象跟踪:使用 ObjectTracker 节点进行 2D 和 3D 跟踪
- 设备端编程:在设备上运行自定义逻辑/任务(指��南)
立体深度感知
- 理想范围:约 70 厘米 - 12 米
- MinZ:约 20 厘米(400P + 扩展视差),约 40 厘米(400P 或 800P + 扩展视差),约 70 厘米(800P)
- 中值深度精度(有关更多信息,请参阅 本文档):
- 3.5 米以下:绝对深度误差低于 2%
- 3.5 米 - 6.5 米:绝对深度误差低于 4%
- 6.5 米 - 9 米:绝对深度误差低于 6%
红外感知
红外点投影仪
红外激光点投影仪会在设备前方投射出许多小点,这有助于视差匹配,尤其是在低视觉兴趣的表面(如墙壁或地板等几乎没有纹理的空白表面)上。我们使用的技术称为 ASV - 传统的有源立体视觉 - 因为立体匹配在设备上的执行方式与 OAK-D(无源立体)相同。下图显示了一面没有纹理的空白墙壁。没有点投影仪时,(无源)深度感知效果很差。当点投影仪设置为约 200mA 时,(有源)深度感知效果要好得多。仔细观察左下角的帧,您可以看到墙壁周围有许多小点。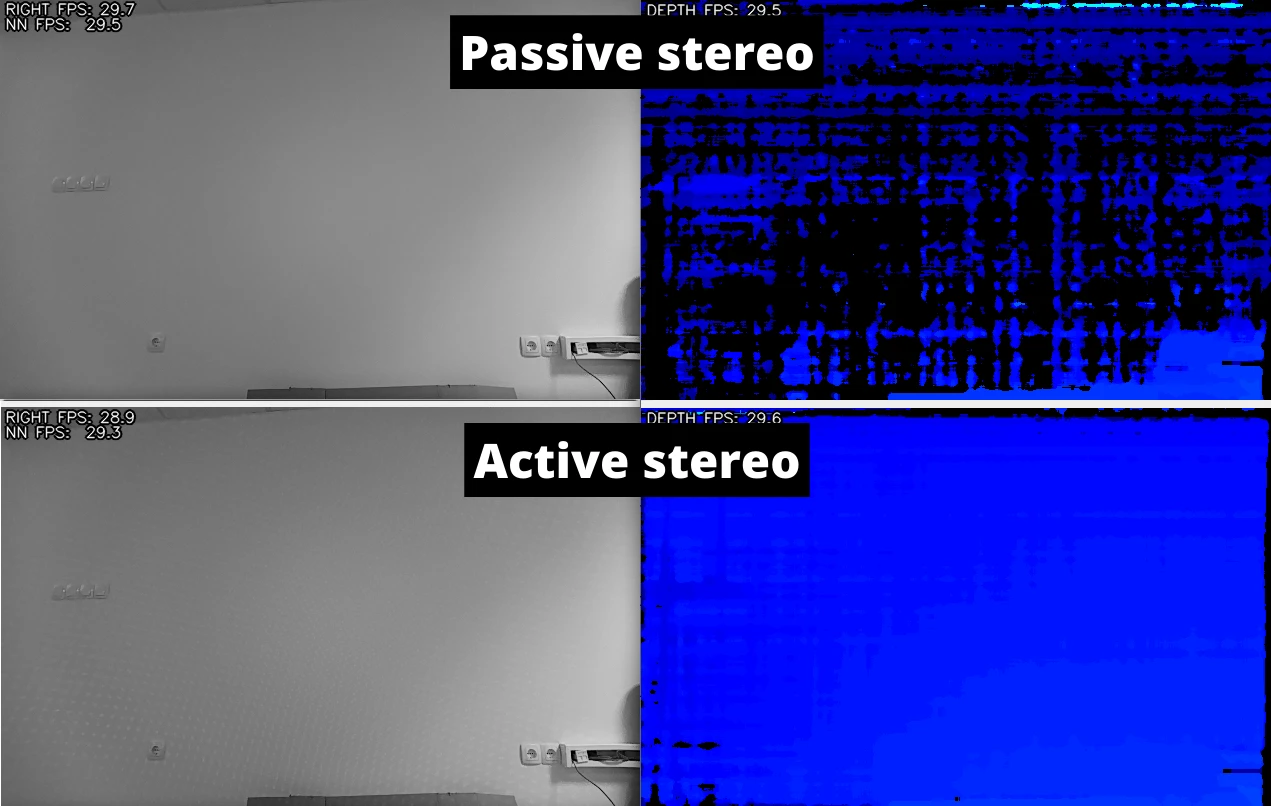

激光点投影仪和泛光 LED 默认禁用! 这是因为大多数用户更愿意在佩戴眼部安全防护装备时主动启用激光点投影仪。
入门
Python
1# 在 Script 节点内:
2script = pipeline.create(dai.node.Script)
3script.setScript("""
4 Device.setIrLaserDotProjectorIntensity(0.5)
5 Device.setIrFloodLightIntensity(0)
6""")
7
8with dai.Device() as device:
9 # 或者,从主机使用 dai.Device 对象:
10 device.setIrLaserDotProjectorIntensity(0.5) # 以百分比表示,范围从 0 到 1
11 device.setIrFloodLightIntensity(0.0) # 以百分比表示,范围从 0 到 1点投影仪规格
Ams Belago1.1 Dot-Pattern Infrared Illuminator数据手册
点数量
4700
HFOI* 50%
78 ± 7%
VFOI* 50%
61° ± 7%
VSCEL 波长
940nm
工作温度
10°C to ~60°C
温度绝对极限
0°C to ~80°C
功耗
- 基础功耗 + PoE 电路 + 摄像头流:3W - 3.5W
- AI 子系统功耗:最高 1W
- 立体深度管线子系统:最高 0.5W
- 视频编码器子系统:最高 0.5W
照明 LED 和激光点投影仪
- 点投影仪(主动立体):最高 1W
- 照明 LED(夜视):最高 1W
IMU
工作温度
振动测试
类似型号
OAK-D S2 PoEOAK-D W PoEOAK-D Pro PoEOAK-D Pro W PoE
激光安全
本产品根据 EN/IEC 60825-1, Edition 3 (2014) 国际标准被归类为 1 类激光产品。

- 如果观察到任何外部损坏,请勿为产品通电。
- 请勿尝试打开本激光产品的任何部分。
- 打开时存在不可见激光辐射。避免直接暴露于光束。
- 本激光产品不包含用户可维修的部件。
- 修改或维修立体模块,特别是红外投影仪,可能导致发射超出 1 类标准。
- 不允许使用任何放大光学元件,例如眼用放大镜和放大镜。
- 请勿尝试更新非特定相机模块和修订版官方发布��的相机固件。