OAK2 SoM 开发指南
OAK-SoM-Pro 的硬件更新
2026 年 5 月之后生产的设备将不包含 eMMC 存储。需要 eMMC?请通过 support@luxonis.com 联系我们的支持团队。
将 DepthAI 集成到产品中的难度
什么是 OAK 系统模块 (SoM)?
- NOR Flash 功能:OAK-SoM 默认不带 NOR Flash,而 Pro 版本默认配备 1Gbit NOR Flash(某些版本使用 125Mbit)。
- 这使得 Pro 版本能够将引导资源存储在板载 NOR Flash 中,而 OAK-SoM 需要主机进行 USB 引导。Pro 版本还支持以太网和 SD 卡 功能(两者互斥)。
底板

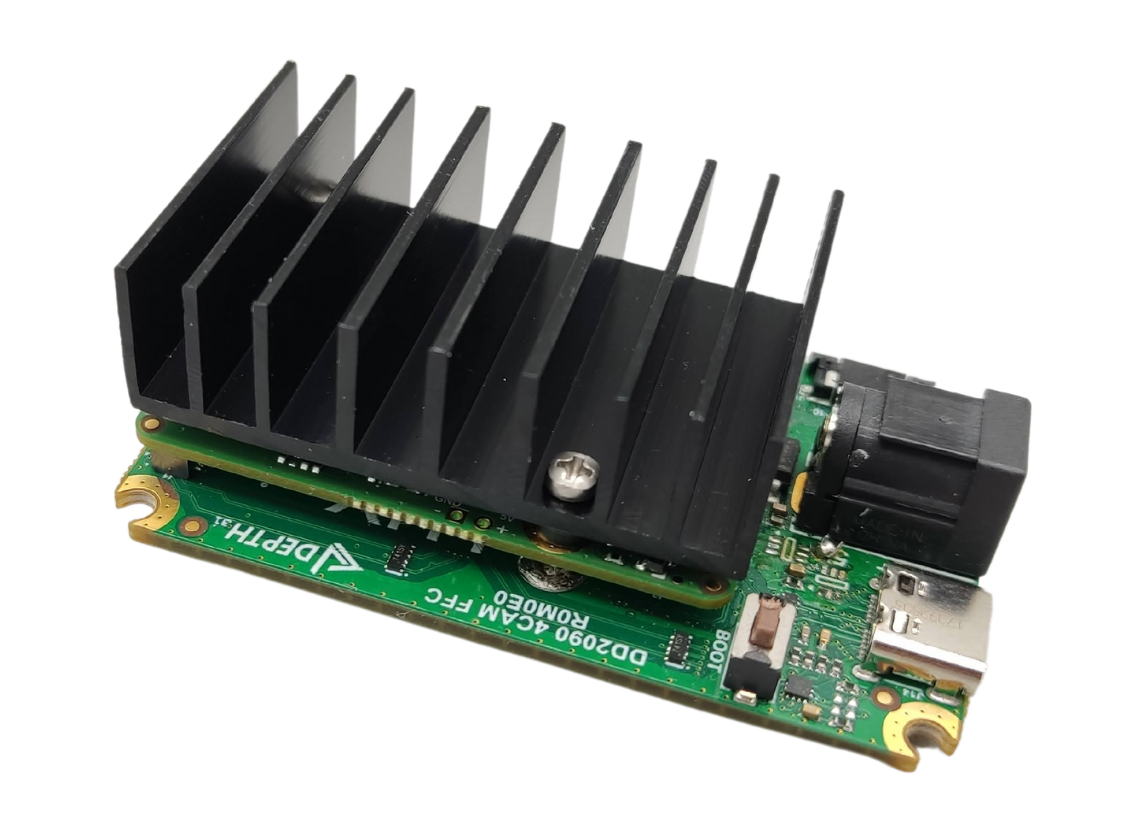
NOR Flash 和供电
OAK 设计指南和机械注意事项
从“为什么”开始:
- 左相机的内参。
- 右相机的内参。
- 左相机和右相机之间平移和旋转的外参。
- 用于对齐立体相机的图像的校正参数。
转到“如何”:
- 确保相机组件刚性良好,没有机械应力、负载或扭矩。
- 考虑安装点和电缆入口点,以尽量减少可能导致相机移动或压力的因素。
- 尽早与 Luxonis 分享设计,以获得关于机械稳健性的反馈。
转到“什么”:
- 将相机安装在刚性结构上:
- 使用附近的金属支撑加固 PCB 安装点,以防止弯曲。
- 使用热隔离的金属进行安装,以避免热膨胀影响相机对齐。
- 设计外部入口点,以防止外力导致相机旋转或平移。
- 使用牢固拧紧的 M12/C/CS 接口相机;使用尼龙螺纹以防止因振动而松动。
- 使用压敏胶 (PSA) 和刚性胶水的组合固定紧凑型相机模块 (CCM),以防止从柔性扁平电缆 (FFC) 上脱落。
需要帮助?
请前往 Discussion Forum 获取技术支持或提出您可能有的任何其他问题。