BNO08X 系列
- 供应商文档:BNO080/BNO085 数据手册
概述
| 规格 | 值 |
|---|---|
| 轴数 | 9 |
| 物理传感器 | 加速度计、陀螺仪、磁力计 |
| 磁力计 | 是 |
| 传感器端派生输出 | 旋转矢量、游戏旋转矢量、地磁旋转矢量、重力、线性加速度 |
| 传感器端绝对航向 | 是 |
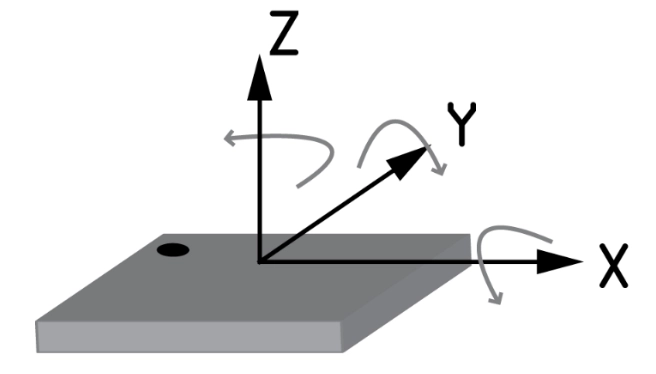
方向
DepthAI 公开的运行时行为
| 规格 | 值 |
|---|---|
| 稳定的加速度计请求点 | 15 / 31 / 62 / 125 / 250 / 500 Hz |
| 稳定的陀螺仪请求点 | 25 / 33 / 50 / 100 / 200 / 400 Hz |
| 原始陀螺仪最大公开速率 | 高达 1000 Hz |
| 加速度计最大公开速率 | 高达 512 Hz |
| 旋转矢量最大公开速率 | 高达 400 Hz |
| 速率舍入行为 | 请求的速率向上舍入到下一个支持的速率 |
公开的报告系列
| 报告 | 最大公开速率 |
|---|---|
ACCELEROMETER_RAW | 512 Hz |
ACCELEROMETER | 512 Hz |
LINEAR_ACCELERATION | 400 Hz |
GRAVITY | 400 Hz |
GYROSCOPE_RAW | 1000 Hz |
GYROSCOPE_CALIBRATED / GYROSCOPE_UNCALIBRATED | 100 Hz |
MAGNETOMETER_RAW | 100 Hz |
MAGNETOMETER_CALIBRATED / MAGNETOMETER_UNCALIBRATED | 100 Hz |
ROTATION_VECTOR | 400 Hz |
GAME_ROTATION_VECTOR | 400 Hz |
GEOMAGNETIC_ROTATION_VECTOR | 100 Hz |
ARVR_STABILIZED_ROTATION_VECTOR | 100 Hz |
ARVR_STABILIZED_GAME_ROTATION_VECTOR | 100 Hz |
特征化的噪声参数
| 轴 | 加速度计噪声密度 | 加速度计随机游走 | 加速度计偏置稳定性 | 陀螺仪噪声密度 | 陀螺仪随机游走 | 陀螺仪偏置稳定性 |
|---|---|---|---|---|---|---|
| X | 0.0692403639964709 | 0.0000461328717714577 | 0.0386793003109186 | 0.465205344044338 | 0.0491916520693084 | 3.99864012266883 |
| Y | 0.0742093087895724 | 0.00010064709494043 | 0.0585864026373569 | 0.586021948307277 | 0.0981500052716509 | 5.28298206123443 |
| Z | 0.0852002105900927 | 0.0000360363593803144 | 0.0487133253165953 | 0.390692669835732 | 0.0609802057752869 | 4.38768918027593 |