BMI270
- 供应商文档:BMI270 数据手册
概述
| 规格 | 值 |
|---|---|
| 轴数 | 6 |
| 物理传感器 | 加速度计、陀螺仪 |
| 磁力计 | 否 |
| 传感器端派生输出 | 无(未作为传感器端融合方向输出公开) |
| 传感器端绝对航向 | 否 |
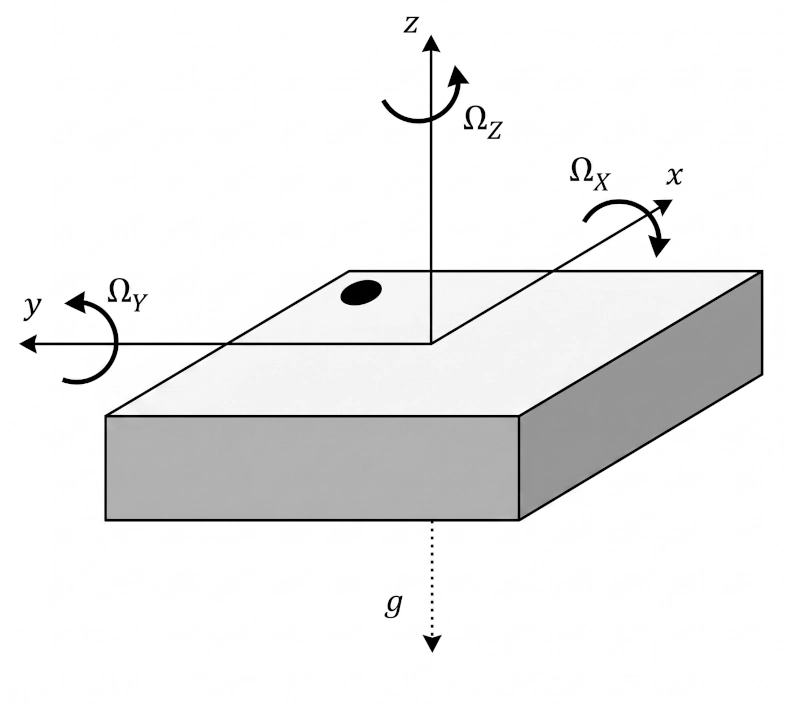
方向
原始芯片特性
| 信号 | 全量程选项 | 灵敏度/量化 | 噪声密度 | 原始 ODR |
|---|---|---|---|---|
| 加速度计 | +-2 / +-4 / +-8 / +-16 g | 16384 / 8192 / 4096 / 2048 LSB/g | 0.16 mg/sqrt(Hz) (典型值) | 12.5 Hz 至 1600 Hz |
| 陀螺仪 | +-125 / +-250 / +-500 / +-1000 / +-2000 dps | 262.144 / 131.072 / 65.536 / 32.768 / 16.384 LSB/dps | 0.007 dps/sqrt(Hz) (性能模式下典型值) | 最高 6400 Hz |
DepthAI 公开的运行时行为
| 规格 | 值 |
|---|---|
| 稳定的加速度计请求点 | 25 / 50 / 100 / 200 / 250 Hz |
| 稳定的陀螺仪请求点 | 25 / 50 / 100 / 200 / 250 Hz |
| 公开的最大报告速率 | 目前高于 400 Hz 的请求会限制在 250 Hz 左右 |
| 速率舍入行为 | 请求的速率向下舍入到下一个支持的速率 |
特征化噪声参数
| 轴 | 加速度计噪声密度 | 加速度计随机游走 | 加速度计偏置稳定性 | 陀螺仪噪声密度 | 陀螺仪随机游走 | 陀螺仪偏置稳定性 |
|---|---|---|---|---|---|---|
| X | 0.0500335019677985 | 0.0000373380684096123 | 0.0686458743689068 | 0.293340698256576 | 0.281106186280429 | 9.19265863311309 |
| Y | 0.0547290899833001 | 0.0000508202354023015 | 0.11014907055065 | 0.285186651912094 | 0.524351050783173 | 9.68103400378115 |
| Z | 0.0636134665575223 | 0.0000284520524391634 | 0.0446480943181604 | 0.301184640372767 | 0.250355639353424 | 6.93407320593193 |