LSM6DSV
- 供应商文档:LSM6DSV 数据手册
概述
| 规格 | 值 |
|---|---|
| 轴数 | 6 |
| 物理传感器 | 加速度计、陀螺仪 |
| 磁力计 | 否 |
| 传感器端派生输出 | 游戏旋转矢量、重力矢量、陀螺仪偏差 |
| 传感器端绝对航向 | 否 |
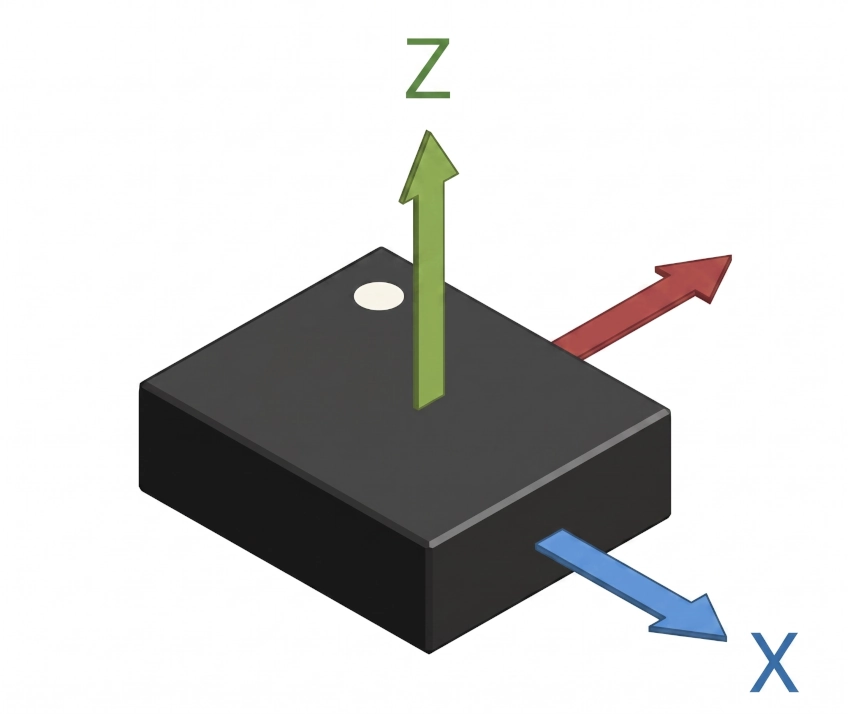
方向
原始芯片特性
| 信号 | 全量程选项 | 灵敏度/量化 | 噪声密度 | 原始 ODR |
|---|---|---|---|---|
| 加速度计 | ±2 / ±4 / ±8 / ±16 g | 0.061 / 0.122 / 0.244 / 0.488 mg/LSB | 60 ug/sqrt(Hz) (高性能模式下典型值) | 最高 7680 Hz |
| 陀螺仪 | ±125 / ±250 / ±500 / ±1000 / ±2000 / ±4000 dps | 4.375 / 8.75 / 17.5 / 35 / 70 / 140 mdps/LSB | 2.8 mdps/sqrt(Hz) (典型值) | 最高 7680 Hz |
DepthAI 公开的运行时行为
| 规格 | 值 |
|---|---|
| 已验证的运行时值 | 单独记录,与芯片原始 ODR 分开 |
| 公开的最大暴露报告速率 | 使用特定产品的验证数据 |
| 速率舍入行为 | 根据产品和软件版本进行验证 |
特征化噪声参数
| 轴 | 加速度计噪声密度 | 加速度计随机游走 | 加速度计偏差稳定性 | 陀螺仪噪声密度 | 陀螺仪随机游走 | 陀螺仪偏差稳定性 |
|---|---|---|---|---|---|---|
| X | 0.0265581027090947 | 0.000010093945255527 | 0.00908348979687702 | 0.16962473704429 | 0.0415246279899921 | 1.9938014488291 |
| Y | 0.0248946412822367 | 0.0000102126378842322 | 0.0115752711877888 | 0.162065795356986 | 0.0553796640289008 | 1.94429340491937 |
| Z | 0.0325070710518501 | 0.000020894079359336 | 0.0154330840172653 | 0.141726916752152 | 0.0522673667125027 | 2.20512465921074 |