- 缩放(resize 模式:letterbox)
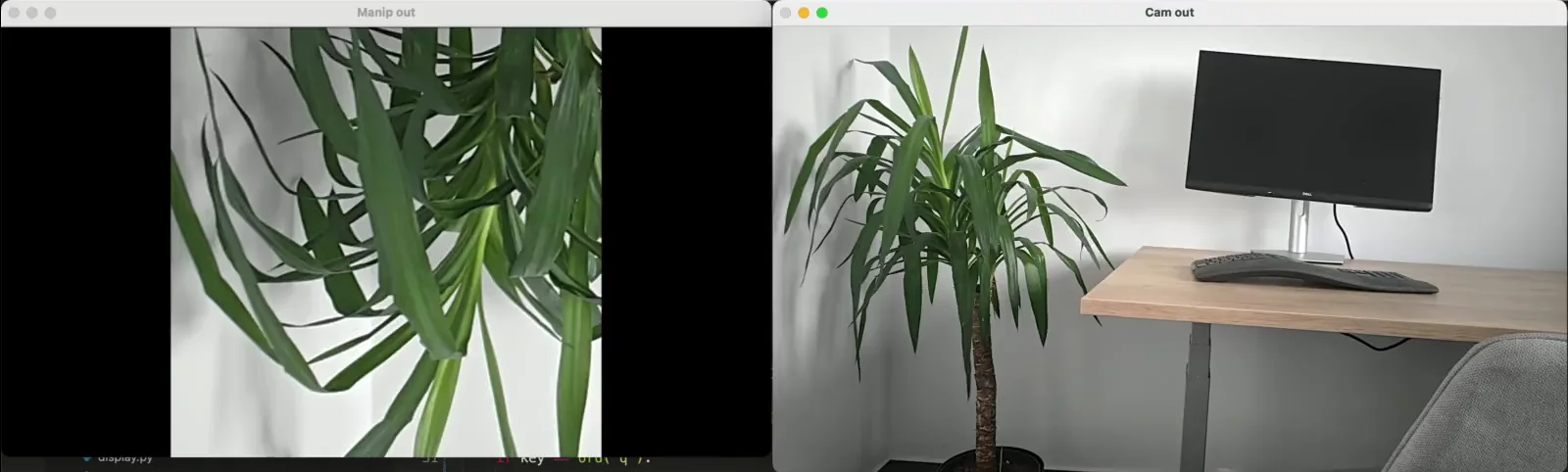
- 裁剪
- 垂直翻转
- 更改帧类型(NV12)
演示
管道
源代码
Python
PythonGitHub
1import depthai as dai
2import cv2
3
4pipeline = dai.Pipeline()
5
6camRgb = pipeline.create(dai.node.Camera).build(dai.CameraBoardSocket.CAM_A)
7manip = pipeline.create(dai.node.ImageManip)
8
9
10manip.initialConfig.setOutputSize(1270, 710, dai.ImageManipConfig.ResizeMode.LETTERBOX)
11manip.initialConfig.addCrop(50, 100, 500, 500)
12manip.initialConfig.addFlipVertical()
13manip.initialConfig.setFrameType(dai.ImgFrame.Type.NV12)
14manip.setMaxOutputFrameSize(2709360)
15
16camRgb.requestOutput((1920, 1080)).link(manip.inputImage)
17
18out = manip.out.createOutputQueue()
19
20pipeline.start()
21
22print(manip.initialConfig)
23
24while True:
25 inFrame = out.get()
26 if inFrame is not None:
27 cv2.imshow("Show frame", inFrame.getCvFrame())
28 key = cv2.waitKey(1)
29 if key == ord('q'):
30 break需要帮助?
请前往 Discussion Forum 获取技术支持或提出您可能有的任何其他问题。