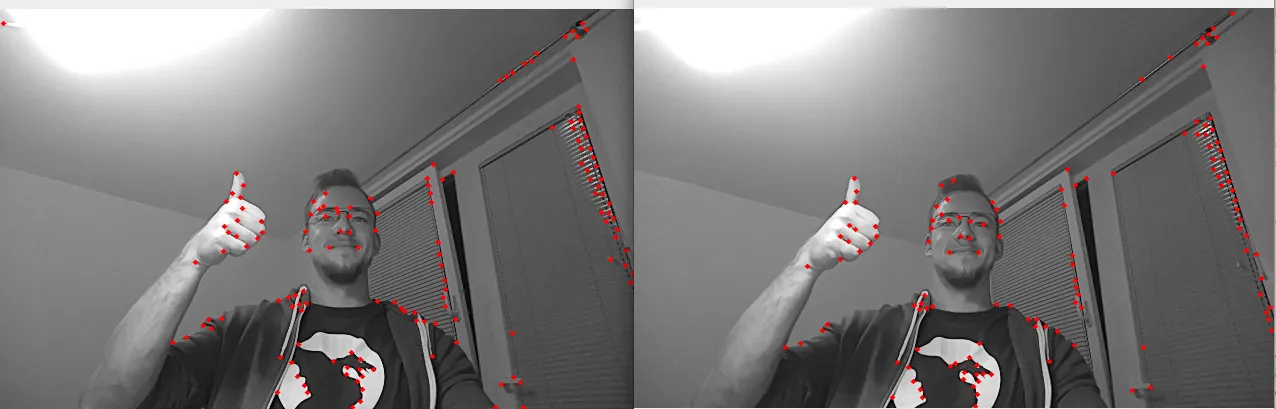
Feature Detector
Demo
Setup
Command Line
1git clone https://github.com/luxonis/depthai-python.git
2cd depthai-python/examples
3python3 install_requirements.pySource code
Python
PythonGitHub
1#!/usr/bin/env python3
2
3import cv2
4import depthai as dai
5
6
7# Create pipeline
8pipeline = dai.Pipeline()
9
10# Define sources and outputs
11monoLeft = pipeline.create(dai.node.MonoCamera)
12monoRight = pipeline.create(dai.node.MonoCamera)
13featureTrackerLeft = pipeline.create(dai.node.FeatureTracker)
14featureTrackerRight = pipeline.create(dai.node.FeatureTracker)
15
16xoutPassthroughFrameLeft = pipeline.create(dai.node.XLinkOut)
17xoutTrackedFeaturesLeft = pipeline.create(dai.node.XLinkOut)
18xoutPassthroughFrameRight = pipeline.create(dai.node.XLinkOut)
19xoutTrackedFeaturesRight = pipeline.create(dai.node.XLinkOut)
20xinTrackedFeaturesConfig = pipeline.create(dai.node.XLinkIn)
21
22xoutPassthroughFrameLeft.setStreamName("passthroughFrameLeft")
23xoutTrackedFeaturesLeft.setStreamName("trackedFeaturesLeft")
24xoutPassthroughFrameRight.setStreamName("passthroughFrameRight")
25xoutTrackedFeaturesRight.setStreamName("trackedFeaturesRight")
26xinTrackedFeaturesConfig.setStreamName("trackedFeaturesConfig")
27
28# Properties
29monoLeft.setResolution(dai.MonoCameraProperties.SensorResolution.THE_400_P)
30monoLeft.setCamera("left")
31monoRight.setResolution(dai.MonoCameraProperties.SensorResolution.THE_400_P)
32monoRight.setCamera("right")
33
34# Disable optical flow
35featureTrackerLeft.initialConfig.setMotionEstimator(False)
36featureTrackerRight.initialConfig.setMotionEstimator(False)
37
38# Linking
39monoLeft.out.link(featureTrackerLeft.inputImage)
40featureTrackerLeft.passthroughInputImage.link(xoutPassthroughFrameLeft.input)
41featureTrackerLeft.outputFeatures.link(xoutTrackedFeaturesLeft.input)
42xinTrackedFeaturesConfig.out.link(featureTrackerLeft.inputConfig)
43
44monoRight.out.link(featureTrackerRight.inputImage)
45featureTrackerRight.passthroughInputImage.link(xoutPassthroughFrameRight.input)
46featureTrackerRight.outputFeatures.link(xoutTrackedFeaturesRight.input)
47xinTrackedFeaturesConfig.out.link(featureTrackerRight.inputConfig)
48
49featureTrackerConfig = featureTrackerRight.initialConfig.get()
50
51print("Press 's' to switch between Harris and Shi-Thomasi corner detector!")
52
53# Connect to device and start pipeline
54with dai.Device(pipeline) as device:
55
56 # Output queues used to receive the results
57 passthroughImageLeftQueue = device.getOutputQueue("passthroughFrameLeft", 8, False)
58 outputFeaturesLeftQueue = device.getOutputQueue("trackedFeaturesLeft", 8, False)
59 passthroughImageRightQueue = device.getOutputQueue("passthroughFrameRight", 8, False)
60 outputFeaturesRightQueue = device.getOutputQueue("trackedFeaturesRight", 8, False)
61
62 inputFeatureTrackerConfigQueue = device.getInputQueue("trackedFeaturesConfig")
63
64 leftWindowName = "left"
65 rightWindowName = "right"
66
67 def drawFeatures(frame, features):
68 pointColor = (0, 0, 255)
69 circleRadius = 2
70 for feature in features:
71 cv2.circle(frame, (int(feature.position.x), int(feature.position.y)), circleRadius, pointColor, -1, cv2.LINE_AA, 0)
72
73 while True:
74 inPassthroughFrameLeft = passthroughImageLeftQueue.get()
75 passthroughFrameLeft = inPassthroughFrameLeft.getFrame()
76 leftFrame = cv2.cvtColor(passthroughFrameLeft, cv2.COLOR_GRAY2BGR)
77
78 inPassthroughFrameRight = passthroughImageRightQueue.get()
79 passthroughFrameRight = inPassthroughFrameRight.getFrame()
80 rightFrame = cv2.cvtColor(passthroughFrameRight, cv2.COLOR_GRAY2BGR)
81
82 trackedFeaturesLeft = outputFeaturesLeftQueue.get().trackedFeatures
83 drawFeatures(leftFrame, trackedFeaturesLeft)
84
85 trackedFeaturesRight = outputFeaturesRightQueue.get().trackedFeatures
86 drawFeatures(rightFrame, trackedFeaturesRight)
87
88 # Show the frame
89 cv2.imshow(leftWindowName, leftFrame)
90 cv2.imshow(rightWindowName, rightFrame)
91
92 key = cv2.waitKey(1)
93 if key == ord('q'):
94 break
95 elif key == ord('s'):
96 if featureTrackerConfig.cornerDetector.type == dai.FeatureTrackerConfig.CornerDetector.Type.HARRIS:
97 featureTrackerConfig.cornerDetector.type = dai.FeatureTrackerConfig.CornerDetector.Type.SHI_THOMASI
98 print("Switching to Shi-Thomasi")
99 else:
100 featureTrackerConfig.cornerDetector.type = dai.FeatureTrackerConfig.CornerDetector.Type.HARRIS
101 print("Switching to Harris")
102
103 cfg = dai.FeatureTrackerConfig()
104 cfg.set(featureTrackerConfig)
105 inputFeatureTrackerConfigQueue.send(cfg)Pipeline
Need assistance?
Head over to Discussion Forum for technical support or any other questions you might have.