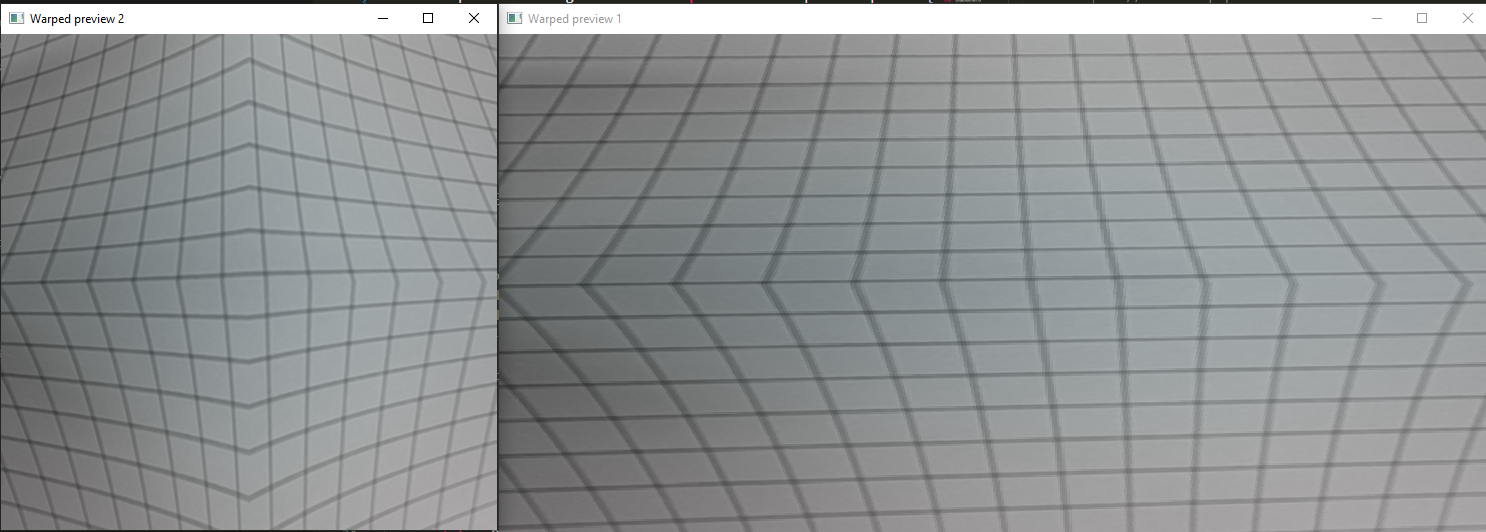
Warp Mesh
Setup
Command Line
1git clone https://github.com/luxonis/depthai-python.git
2cd depthai-python/examples
3python3 install_requirements.pyDemo
Source code
Python
PythonGitHub
1#!/usr/bin/env python3
2import cv2
3import depthai as dai
4import numpy as np
5
6# Create pipeline
7pipeline = dai.Pipeline()
8
9camRgb = pipeline.create(dai.node.ColorCamera)
10camRgb.setPreviewSize(496, 496)
11camRgb.setInterleaved(False)
12maxFrameSize = camRgb.getPreviewWidth() * camRgb.getPreviewHeight() * 3
13
14# Warp preview frame 1
15warp1 = pipeline.create(dai.node.Warp)
16# Create a custom warp mesh
17tl = dai.Point2f(20, 20)
18tr = dai.Point2f(460, 20)
19ml = dai.Point2f(100, 250)
20mr = dai.Point2f(400, 250)
21bl = dai.Point2f(20, 460)
22br = dai.Point2f(460, 460)
23warp1.setWarpMesh([tl,tr,ml,mr,bl,br], 2, 3)
24WARP1_OUTPUT_FRAME_SIZE = (992,500)
25warp1.setOutputSize(WARP1_OUTPUT_FRAME_SIZE)
26warp1.setMaxOutputFrameSize(WARP1_OUTPUT_FRAME_SIZE[0] * WARP1_OUTPUT_FRAME_SIZE[1] * 3)
27warp1.setHwIds([1])
28warp1.setInterpolation(dai.Interpolation.NEAREST_NEIGHBOR)
29
30camRgb.preview.link(warp1.inputImage)
31xout1 = pipeline.create(dai.node.XLinkOut)
32xout1.setStreamName('out1')
33warp1.out.link(xout1.input)
34
35# Warp preview frame 2
36warp2 = pipeline.create(dai.node.Warp)
37# Create a custom warp mesh
38mesh2 = [
39 (20, 20), (250, 100), (460, 20),
40 (100, 250), (250, 250), (400, 250),
41 (20, 480), (250, 400), (460,480)
42]
43warp2.setWarpMesh(mesh2, 3, 3)
44warp2.setMaxOutputFrameSize(maxFrameSize)
45warp1.setHwIds([2])
46warp2.setInterpolation(dai.Interpolation.BICUBIC)
47
48camRgb.preview.link(warp2.inputImage)
49xout2 = pipeline.create(dai.node.XLinkOut)
50xout2.setStreamName('out2')
51warp2.out.link(xout2.input)
52
53# Connect to device and start pipeline
54with dai.Device(pipeline) as device:
55 # Output queue will be used to get the rgb frames from the output defined above
56 q1 = device.getOutputQueue(name="out1", maxSize=8, blocking=False)
57 q2 = device.getOutputQueue(name="out2", maxSize=8, blocking=False)
58
59 while True:
60 in1 = q1.get()
61 if in1 is not None:
62 cv2.imshow("Warped preview 1", in1.getCvFrame())
63 in2 = q2.get()
64 if in2 is not None:
65 cv2.imshow("Warped preview 2", in2.getCvFrame())
66
67 if cv2.waitKey(1) == ord('q'):
68 breakPipeline
Need assistance?
Head over to Discussion Forum for technical support or any other questions you might have.