Script change pipeline flow
Script change pipeline flow
Demo
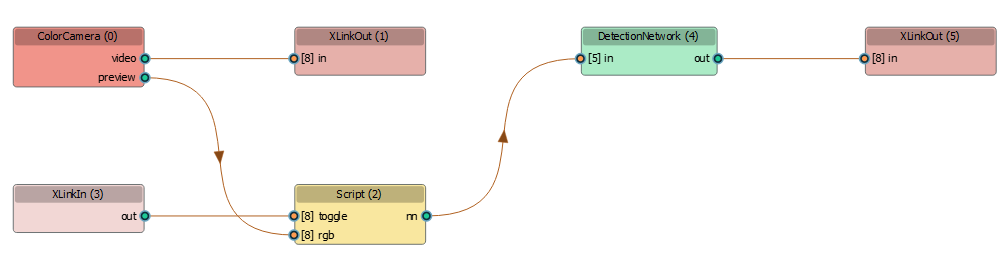
Pipeline Graph
Setup
Command Line
1git clone https://github.com/luxonis/depthai-python.git
2cd depthai-python/examples
3python3 install_requirements.pySource code
Python
PythonGitHub
1#!/usr/bin/env python3
2import depthai as dai
3import cv2
4from pathlib import Path
5import numpy as np
6
7parentDir = Path(__file__).parent
8nnPath = str((parentDir / Path('../models/mobilenet-ssd_openvino_2021.4_5shave.blob')).resolve().absolute())
9
10pipeline = dai.Pipeline()
11
12cam = pipeline.createColorCamera()
13cam.setBoardSocket(dai.CameraBoardSocket.CAM_A)
14cam.setInterleaved(False)
15cam.setIspScale(2,3)
16cam.setVideoSize(720,720)
17cam.setPreviewSize(300,300)
18
19xoutRgb = pipeline.create(dai.node.XLinkOut)
20xoutRgb.setStreamName('rgb')
21cam.video.link(xoutRgb.input)
22
23script = pipeline.createScript()
24
25xin = pipeline.create(dai.node.XLinkIn)
26xin.setStreamName('in')
27xin.out.link(script.inputs['toggle'])
28
29cam.preview.link(script.inputs['rgb'])
30script.setScript("""
31 toggle = False
32 while True:
33 msg = node.io['toggle'].tryGet()
34 if msg is not None:
35 toggle = msg.getData()[0]
36 node.warn('Toggle! Perform NN inferencing: ' + str(toggle))
37
38 frame = node.io['rgb'].get()
39
40 if toggle:
41 node.io['nn'].send(frame)
42""")
43
44nn = pipeline.create(dai.node.MobileNetDetectionNetwork)
45nn.setBlobPath(nnPath)
46script.outputs['nn'].link(nn.input)
47
48xoutNn = pipeline.create(dai.node.XLinkOut)
49xoutNn.setStreamName('nn')
50nn.out.link(xoutNn.input)
51
52# Connect to device with pipeline
53with dai.Device(pipeline) as device:
54 inQ = device.getInputQueue("in")
55 qRgb = device.getOutputQueue("rgb")
56 qNn = device.getOutputQueue("nn")
57
58 runNn = False
59
60 def frameNorm(frame, bbox):
61 normVals = np.full(len(bbox), frame.shape[0])
62 normVals[::2] = frame.shape[1]
63 return (np.clip(np.array(bbox), 0, 1) * normVals).astype(int)
64
65 color = (255, 127, 0)
66 def drawDetections(frame, detections):
67 for detection in detections:
68 bbox = frameNorm(frame, (detection.xmin, detection.ymin, detection.xmax, detection.ymax))
69 cv2.putText(frame, f"{int(detection.confidence * 100)}%", (bbox[0] + 10, bbox[1] + 20), cv2.FONT_HERSHEY_TRIPLEX, 0.5, color)
70 cv2.rectangle(frame, (bbox[0], bbox[1]), (bbox[2], bbox[3]), color, 2)
71
72
73 while True:
74 frame = qRgb.get().getCvFrame()
75
76 if qNn.has():
77 detections = qNn.get().detections
78 drawDetections(frame, detections)
79
80 cv2.putText(frame, f"NN inferencing: {runNn}", (20,20), cv2.FONT_HERSHEY_TRIPLEX, 0.7, color)
81 cv2.imshow('Color frame', frame)
82
83 key = cv2.waitKey(1)
84 if key == ord('q'):
85 break
86 elif key == ord('t'):
87 runNn = not runNn
88 print(f"{'Enabling' if runNn else 'Disabling'} NN inferencing")
89 buf = dai.Buffer()
90 buf.setData(runNn)
91 inQ.send(buf)Pipeline
Need assistance?
Head over to Discussion Forum for technical support or any other questions you might have.