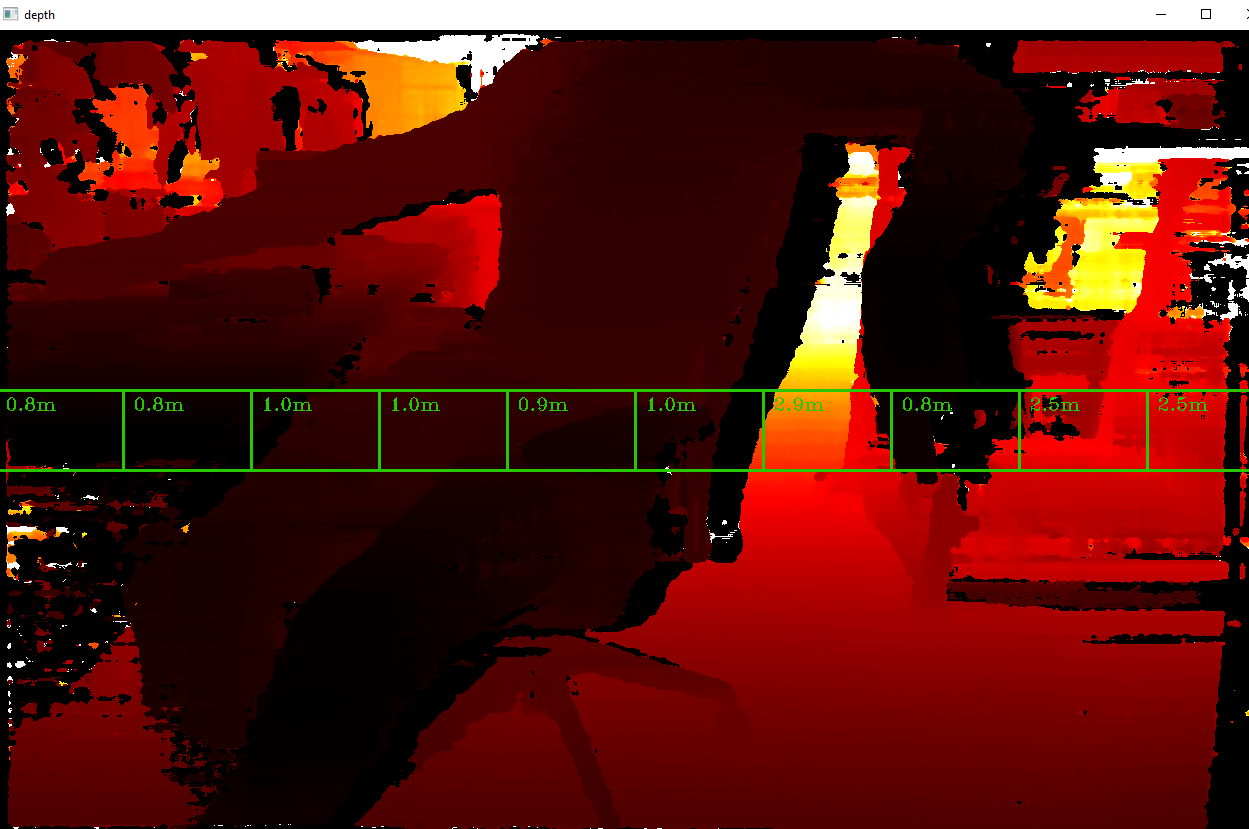
Spatial Calculator Multi-ROI
This example shows how one can use multiple ROIs with a single SpatialLocationCalculator node. A similar logic could be used as a simple depth line scanning camera for mobile robots.Similar samples:
Demo
Setup
Please run the install script to download all required dependencies. Please note that this script must be ran from git context, so you have to download the depthai-python repository first and then run the scriptCommand Line
1git clone https://github.com/luxonis/depthai-python.git
2cd depthai-python/examples
3python3 install_requirements.pySource code
Python
C++
Python
PythonGitHub
1#!/usr/bin/env python3
2
3import cv2
4import depthai as dai
5import math
6import numpy as np
7
8# Create pipeline
9pipeline = dai.Pipeline()
10
11# Define sources and outputs
12monoLeft = pipeline.create(dai.node.MonoCamera)
13monoRight = pipeline.create(dai.node.MonoCamera)
14stereo = pipeline.create(dai.node.StereoDepth)
15spatialLocationCalculator = pipeline.create(dai.node.SpatialLocationCalculator)
16
17xoutDepth = pipeline.create(dai.node.XLinkOut)
18xoutSpatialData = pipeline.create(dai.node.XLinkOut)
19xinSpatialCalcConfig = pipeline.create(dai.node.XLinkIn)
20
21xoutDepth.setStreamName("depth")
22xoutSpatialData.setStreamName("spatialData")
23xinSpatialCalcConfig.setStreamName("spatialCalcConfig")
24
25# Properties
26monoLeft.setResolution(dai.MonoCameraProperties.SensorResolution.THE_400_P)
27monoLeft.setCamera("left")
28monoRight.setResolution(dai.MonoCameraProperties.SensorResolution.THE_400_P)
29monoRight.setCamera("right")
30
31stereo.setDefaultProfilePreset(dai.node.StereoDepth.PresetMode.HIGH_DENSITY)
32stereo.setLeftRightCheck(True)
33stereo.setSubpixel(True)
34spatialLocationCalculator.inputConfig.setWaitForMessage(False)
35
36# Create 10 ROIs
37for i in range(10):
38 config = dai.SpatialLocationCalculatorConfigData()
39 config.depthThresholds.lowerThreshold = 200
40 config.depthThresholds.upperThreshold = 10000
41 config.roi = dai.Rect(dai.Point2f(i*0.1, 0.45), dai.Point2f((i+1)*0.1, 0.55))
42 spatialLocationCalculator.initialConfig.addROI(config)
43
44# Linking
45monoLeft.out.link(stereo.left)
46monoRight.out.link(stereo.right)
47
48spatialLocationCalculator.passthroughDepth.link(xoutDepth.input)
49stereo.depth.link(spatialLocationCalculator.inputDepth)
50
51spatialLocationCalculator.out.link(xoutSpatialData.input)
52xinSpatialCalcConfig.out.link(spatialLocationCalculator.inputConfig)
53
54# Connect to device and start pipeline
55with dai.Device(pipeline) as device:
56 device.setIrLaserDotProjectorBrightness(1000)
57
58 # Output queue will be used to get the depth frames from the outputs defined above
59 depthQueue = device.getOutputQueue(name="depth", maxSize=4, blocking=False)
60 spatialCalcQueue = device.getOutputQueue(name="spatialData", maxSize=4, blocking=False)
61 color = (0,200,40)
62 fontType = cv2.FONT_HERSHEY_TRIPLEX
63
64 while True:
65 inDepth = depthQueue.get() # Blocking call, will wait until a new data has arrived
66
67 depthFrame = inDepth.getFrame() # depthFrame values are in millimeters
68
69 depth_downscaled = depthFrame[::4]
70 if np.all(depth_downscaled == 0):
71 min_depth = 0 # Set a default minimum depth value when all elements are zero
72 else:
73 min_depth = np.percentile(depth_downscaled[depth_downscaled != 0], 1)
74 max_depth = np.percentile(depth_downscaled, 99)
75 depthFrameColor = np.interp(depthFrame, (min_depth, max_depth), (0, 255)).astype(np.uint8)
76 depthFrameColor = cv2.applyColorMap(depthFrameColor, cv2.COLORMAP_HOT)
77
78 spatialData = spatialCalcQueue.get().getSpatialLocations()
79 for depthData in spatialData:
80 roi = depthData.config.roi
81 roi = roi.denormalize(width=depthFrameColor.shape[1], height=depthFrameColor.shape[0])
82
83 xmin = int(roi.topLeft().x)
84 ymin = int(roi.topLeft().y)
85 xmax = int(roi.bottomRight().x)
86 ymax = int(roi.bottomRight().y)
87
88 coords = depthData.spatialCoordinates
89 distance = math.sqrt(coords.x ** 2 + coords.y ** 2 + coords.z ** 2)
90
91 cv2.rectangle(depthFrameColor, (xmin, ymin), (xmax, ymax), color, thickness=2)
92 cv2.putText(depthFrameColor, "{:.1f}m".format(distance/1000), (xmin + 10, ymin + 20), fontType, 0.6, color)
93 # Show the frame
94 cv2.imshow("depth", depthFrameColor)
95
96 if cv2.waitKey(1) == ord('q'):
97 breakPipeline
Need assistance?
Head over to Discussion Forum for technical support or any other questions you might have.