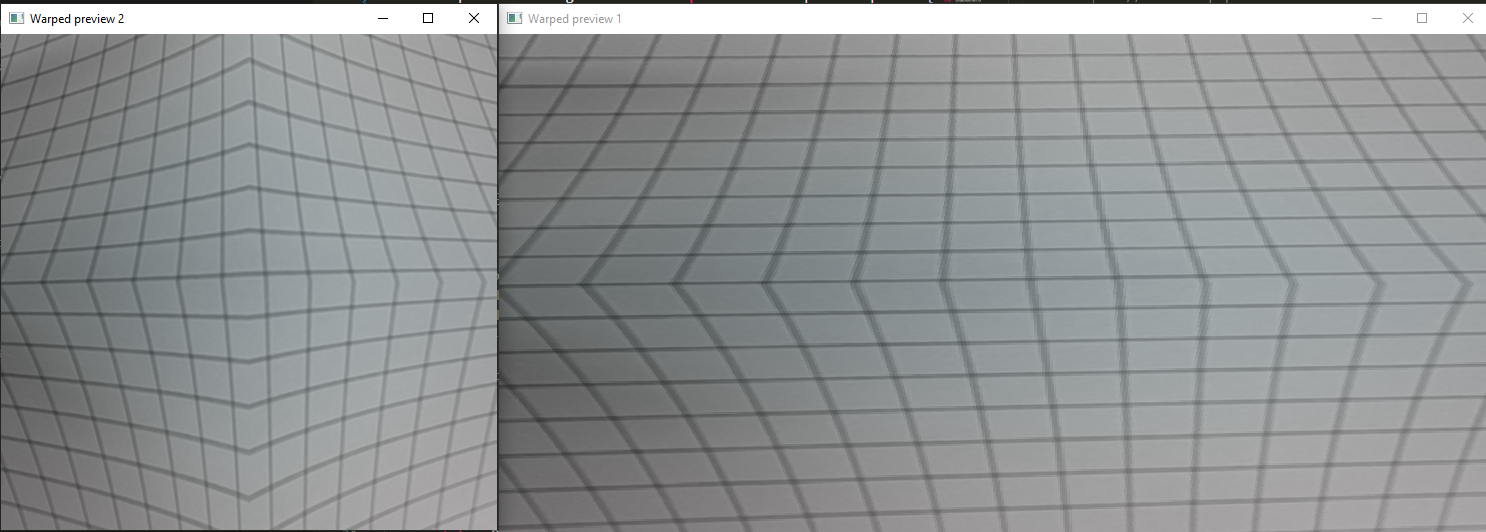
Warp Mesh
This example shows usage of Warp node to warp the input image frame.Setup
Please run the install script to download all required dependencies. Please note that this script must be ran from git context, so you have to download the depthai-python repository first and then run the scriptCommand Line
1git clone https://github.com/luxonis/depthai-python.git
2cd depthai-python/examples
3python3 install_requirements.pyDemo
Source code
Python
C++
Python
PythonGitHub
1#!/usr/bin/env python3
2import cv2
3import depthai as dai
4import numpy as np
5
6# Create pipeline
7pipeline = dai.Pipeline()
8
9camRgb = pipeline.create(dai.node.ColorCamera)
10camRgb.setPreviewSize(496, 496)
11camRgb.setInterleaved(False)
12maxFrameSize = camRgb.getPreviewWidth() * camRgb.getPreviewHeight() * 3
13
14# Warp preview frame 1
15warp1 = pipeline.create(dai.node.Warp)
16# Create a custom warp mesh
17tl = dai.Point2f(20, 20)
18tr = dai.Point2f(460, 20)
19ml = dai.Point2f(100, 250)
20mr = dai.Point2f(400, 250)
21bl = dai.Point2f(20, 460)
22br = dai.Point2f(460, 460)
23warp1.setWarpMesh([tl,tr,ml,mr,bl,br], 2, 3)
24WARP1_OUTPUT_FRAME_SIZE = (992,500)
25warp1.setOutputSize(WARP1_OUTPUT_FRAME_SIZE)
26warp1.setMaxOutputFrameSize(WARP1_OUTPUT_FRAME_SIZE[0] * WARP1_OUTPUT_FRAME_SIZE[1] * 3)
27warp1.setHwIds([1])
28warp1.setInterpolation(dai.Interpolation.NEAREST_NEIGHBOR)
29
30camRgb.preview.link(warp1.inputImage)
31xout1 = pipeline.create(dai.node.XLinkOut)
32xout1.setStreamName('out1')
33warp1.out.link(xout1.input)
34
35# Warp preview frame 2
36warp2 = pipeline.create(dai.node.Warp)
37# Create a custom warp mesh
38mesh2 = [
39 (20, 20), (250, 100), (460, 20),
40 (100, 250), (250, 250), (400, 250),
41 (20, 480), (250, 400), (460,480)
42]
43warp2.setWarpMesh(mesh2, 3, 3)
44warp2.setMaxOutputFrameSize(maxFrameSize)
45warp1.setHwIds([2])
46warp2.setInterpolation(dai.Interpolation.BICUBIC)
47
48camRgb.preview.link(warp2.inputImage)
49xout2 = pipeline.create(dai.node.XLinkOut)
50xout2.setStreamName('out2')
51warp2.out.link(xout2.input)
52
53# Connect to device and start pipeline
54with dai.Device(pipeline) as device:
55 # Output queue will be used to get the rgb frames from the output defined above
56 q1 = device.getOutputQueue(name="out1", maxSize=8, blocking=False)
57 q2 = device.getOutputQueue(name="out2", maxSize=8, blocking=False)
58
59 while True:
60 in1 = q1.get()
61 if in1 is not None:
62 cv2.imshow("Warped preview 1", in1.getCvFrame())
63 in2 = q2.get()
64 if in2 is not None:
65 cv2.imshow("Warped preview 2", in2.getCvFrame())
66
67 if cv2.waitKey(1) == ord('q'):
68 breakPipeline
Need assistance?
Head over to Discussion Forum for technical support or any other questions you might have.