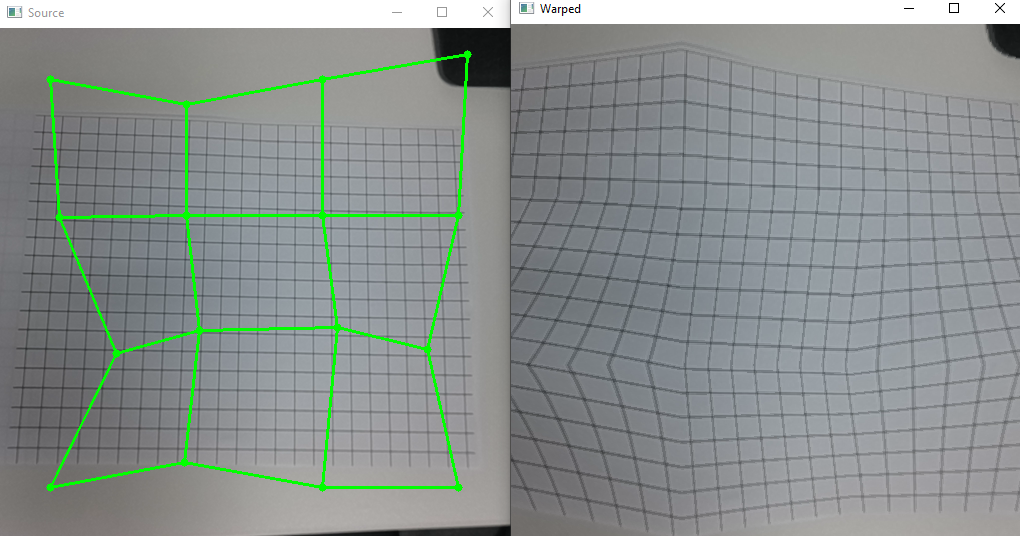
Interactive Warp Mesh
This example shows usage of Warp node to warp the input image frame. It let's you interactively change the mesh points to warp the image. After changing the points, user has to pressr to restart the pipeline and apply the changes.User-defined arguments:--mesh_dims- Mesh dimensions (default:4x4).--resolution- Resolution of the input image (default:512x512). Width must be divisible by 16.--random- To generate random mesh points (disabled by default).
Setup
Please run the install script to download all required dependencies. Please note that this script must be ran from git context, so you have to download the depthai-python repository first and then run the scriptCommand Line
1git clone https://github.com/luxonis/depthai-python.git
2cd depthai-python/examples
3python3 install_requirements.pyDemo
Source code
Python
C++
Python
PythonGitHub
1#!/usr/bin/env python3
2import cv2
3import depthai as dai
4import numpy as np
5import argparse
6import re
7import sys
8from random import randint
9
10parser = argparse.ArgumentParser()
11parser.add_argument("-m", "--mesh_dims", type=str, default="4x4", help="mesh dimensions widthxheight (default=%(default)s)")
12parser.add_argument("-r", "--resolution", type=str, default="512x512", help="preview resolution (default=%(default)s)")
13parser.add_argument("-rnd", "--random", action="store_true", help="Generate random initial mesh")
14args = parser.parse_args()
15
16# mesh dimensions
17match = re.search(r'.*?(\d+)x(\d+).*', args.mesh_dims)
18if not match:
19 raise Exception(f"Mesh dimensions format incorrect '{args.resolution}'!")
20mesh_w = int(match.group(1))
21mesh_h = int(match.group(2))
22
23# Preview resolution
24match = re.search(r'.*?(\d+)x(\d+).*', args.resolution)
25if not match:
26 raise Exception(f"Resolution format incorrect '{args.resolution}'!")
27preview_w = int(match.group(1))
28preview_h = int(match.group(2))
29if preview_w % 16 != 0:
30 raise Exception(f"Preview width must be a multiple of 16!")
31
32# Create an initial mesh (optionally random) of dimension mesh_w x mesh_h
33first_point_x = int(preview_w / 10)
34between_points_x = int(4 * preview_w / (5 * (mesh_w - 1)))
35first_point_y = int(preview_h / 10)
36between_points_y = int(4 * preview_h / (5 * (mesh_h - 1)))
37if args.random:
38 max_rnd_x = int(between_points_x / 4)
39 max_rnd_y = int(between_points_y / 4)
40mesh = []
41for i in range(mesh_h):
42 for j in range(mesh_w):
43 x = first_point_x + j * between_points_x
44 y = first_point_y + i * between_points_y
45 if args.random:
46 rnd_x = randint(-max_rnd_x, max_rnd_x)
47 if x + rnd_x > 0 and x + rnd_x < preview_w:
48 x += rnd_x
49 rnd_y = randint(-max_rnd_y, max_rnd_y)
50 if y + rnd_y > 0 and y + rnd_y < preview_h:
51 y += rnd_y
52 mesh.append((x, y))
53
54def create_pipeline(mesh):
55 print(mesh)
56 # Create pipeline
57 pipeline = dai.Pipeline()
58
59 camRgb = pipeline.create(dai.node.ColorCamera)
60 camRgb.setPreviewSize(preview_w, preview_h)
61 camRgb.setInterleaved(False)
62 width = camRgb.getPreviewWidth()
63 height = camRgb.getPreviewHeight()
64
65 # Output source
66 xout_source = pipeline.create(dai.node.XLinkOut)
67 xout_source.setStreamName('source')
68 camRgb.preview.link(xout_source.input)
69 # Warp source frame
70 warp = pipeline.create(dai.node.Warp)
71 warp.setWarpMesh(mesh, mesh_w, mesh_h)
72 warp.setOutputSize(width, height)
73 warp.setMaxOutputFrameSize(width * height * 3)
74 camRgb.preview.link(warp.inputImage)
75
76 warp.setHwIds([1])
77 warp.setInterpolation(dai.Interpolation.NEAREST_NEIGHBOR)
78 # Output warped
79 xout_warped = pipeline.create(dai.node.XLinkOut)
80 xout_warped.setStreamName('warped')
81 warp.out.link(xout_warped.input)
82 return pipeline
83
84point_selected = None
85
86def mouse_callback(event, x, y, flags, param):
87 global mesh, point_selected, mesh_changed
88 if event == cv2.EVENT_LBUTTONDOWN:
89 if point_selected is None:
90 # Which point is selected ?
91 min_dist = 100
92
93 for i in range(len(mesh)):
94 dist = np.linalg.norm((x - mesh[i][0], y - mesh[i][1]))
95 if dist < 20 and dist < min_dist:
96 min_dist = dist
97 point_selected = i
98 if point_selected is not None:
99 mesh[point_selected] = (x, y)
100 mesh_changed = True
101
102 elif event == cv2.EVENT_LBUTTONUP:
103 point_selected = None
104 elif event == cv2.EVENT_MOUSEMOVE:
105 if point_selected is not None:
106 mesh[point_selected] = (x, y)
107 mesh_changed = True
108
109
110cv2.namedWindow("Source")
111cv2.setMouseCallback("Source", mouse_callback)
112
113running = True
114
115print("Use your mouse to modify the mesh by clicking/moving points of the mesh in the Source window")
116print("Then press 'r' key to restart the device/pipeline")
117while running:
118 pipeline = create_pipeline(mesh)
119 # Connect to device and start pipeline
120 with dai.Device(pipeline) as device:
121 print("Starting device")
122 # Output queue will be used to get the rgb frames from the output defined above
123 q_source = device.getOutputQueue(name="source", maxSize=4, blocking=False)
124 q_warped = device.getOutputQueue(name="warped", maxSize=4, blocking=False)
125
126 restart_device = False
127 mesh_changed = False
128 while not restart_device:
129 in0 = q_source.get()
130 if in0 is not None:
131 source = in0.getCvFrame()
132 color = (0, 0,255) if mesh_changed else (0,255,0)
133 for i in range(len(mesh)):
134 cv2.circle(source, (mesh[i][0], mesh[i][1]), 4, color, -1)
135 if i % mesh_w != mesh_w -1:
136 cv2.line(source, (mesh[i][0], mesh[i][1]), (mesh[i+1][0], mesh[i+1][1]), color, 2)
137 if i + mesh_w < len(mesh):
138 cv2.line(source, (mesh[i][0], mesh[i][1]), (mesh[i+mesh_w][0], mesh[i+mesh_w][1]), color, 2)
139 cv2.imshow("Source", source)
140
141 in1 = q_warped.get()
142 if in1 is not None:
143 cv2.imshow("Warped", in1.getCvFrame())
144
145 key = cv2.waitKey(1)
146 if key == ord('r'): # Restart the device if mesh has changed
147 if mesh_changed:
148 print("Restart requested...")
149 mesh_changed = False
150 restart_device = True
151 elif key == 27 or key == ord('q'): # Exit
152 running = False
153 breakPipeline
Need assistance?
Head over to Discussion Forum for technical support or any other questions you might have.