Depth Preview
This example shows how to set the SGBM (semi-global-matching) disparity-depth node, connects over XLink to transfer the results to the host real-time, and displays the depth map in OpenCV. Note that disparity is used in this case, as it colorizes in a more intuitive way. Below is also a preview of using different median filters side-by-side on a depth image. There are 3 depth modes which you can select inside the code:lr_check: used for better occlusion handling. For more information click hereextended_disparity: suitable for short range objects. For more information click heresubpixel: suitable for long range. For more information click here
Similar samples:
Demo
Filtering depth using median filter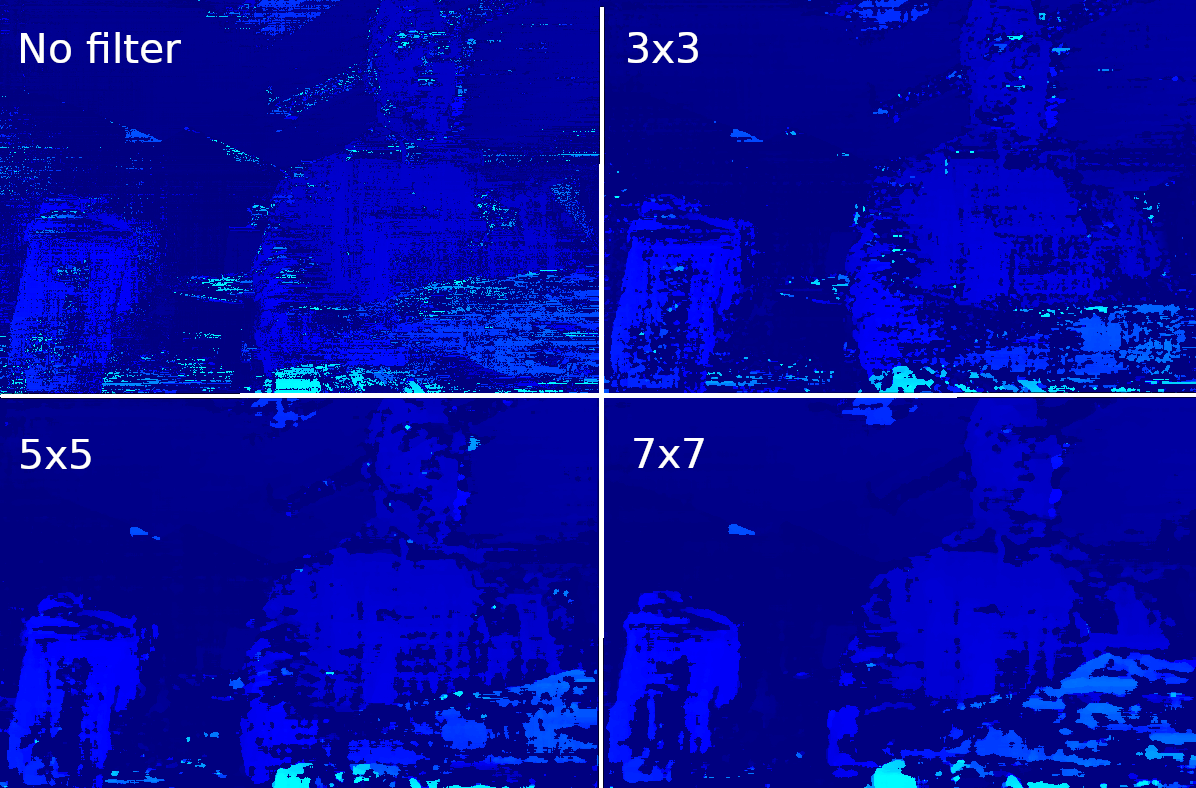
Setup
Please run the install script to download all required dependencies. Please note that this script must be ran from git context, so you have to download the depthai-python repository first and then run the scriptCommand Line
1git clone https://github.com/luxonis/depthai-python.git
2cd depthai-python/examples
3python3 install_requirements.pySource code
Python
C++
Python
PythonGitHub
1#!/usr/bin/env python3
2
3import cv2
4import depthai as dai
5import numpy as np
6
7# Closer-in minimum depth, disparity range is doubled (from 95 to 190):
8extended_disparity = False
9# Better accuracy for longer distance, fractional disparity 32-levels:
10subpixel = False
11# Better handling for occlusions:
12lr_check = True
13
14# Create pipeline
15pipeline = dai.Pipeline()
16
17# Define sources and outputs
18monoLeft = pipeline.create(dai.node.MonoCamera)
19monoRight = pipeline.create(dai.node.MonoCamera)
20depth = pipeline.create(dai.node.StereoDepth)
21xout = pipeline.create(dai.node.XLinkOut)
22
23xout.setStreamName("disparity")
24
25# Properties
26monoLeft.setResolution(dai.MonoCameraProperties.SensorResolution.THE_400_P)
27monoLeft.setCamera("left")
28monoRight.setResolution(dai.MonoCameraProperties.SensorResolution.THE_400_P)
29monoRight.setCamera("right")
30
31# Create a node that will produce the depth map (using disparity output as it's easier to visualize depth this way)
32depth.setDefaultProfilePreset(dai.node.StereoDepth.PresetMode.HIGH_DENSITY)
33# Options: MEDIAN_OFF, KERNEL_3x3, KERNEL_5x5, KERNEL_7x7 (default)
34depth.initialConfig.setMedianFilter(dai.MedianFilter.KERNEL_7x7)
35depth.setLeftRightCheck(lr_check)
36depth.setExtendedDisparity(extended_disparity)
37depth.setSubpixel(subpixel)
38
39# Linking
40monoLeft.out.link(depth.left)
41monoRight.out.link(depth.right)
42depth.disparity.link(xout.input)
43
44# Connect to device and start pipeline
45with dai.Device(pipeline) as device:
46
47 # Output queue will be used to get the disparity frames from the outputs defined above
48 q = device.getOutputQueue(name="disparity", maxSize=4, blocking=False)
49
50 while True:
51 inDisparity = q.get() # blocking call, will wait until a new data has arrived
52 frame = inDisparity.getFrame()
53 # Normalization for better visualization
54 frame = (frame * (255 / depth.initialConfig.getMaxDisparity())).astype(np.uint8)
55
56 cv2.imshow("disparity", frame)
57
58 # Available color maps: https://docs.opencv.org/3.4/d3/d50/group__imgproc__colormap.html
59 frame = cv2.applyColorMap(frame, cv2.COLORMAP_JET)
60 cv2.imshow("disparity_color", frame)
61
62 if cv2.waitKey(1) == ord('q'):
63 breakPipeline
Need assistance?
Head over to Discussion Forum for technical support or any other questions you might have.