Depth perception¶
DepthAI platform supports different ways of perceiving depth:
Passive stereo depth perception - Used by non-Pro version of OAK-D cameras
Active stereo depth perception - Used by Pro version of OAK-D cameras
Time-of-Flight depth perception - Used by OAK-pToF
Passive stereo depth perception¶
Passive stereo works a lot like our eyes. Our brains (subconsciously) estimate the depth of objects and scenes based on the difference of what our left eye sees versus what our right eye sees. On OAK-D cameras, it’s exactly the same; we have a stereo camera pair - left and right monocular cameras - and the VPU (brains of the OAK cameras) does the disparity matching to estimate the depth of objects and scenes.
The disparity is the distance (in pixels) between the same point in the left and right image of the stereo pair camera. A great demo of disparity is below - the disparity is visualized with a red line between points/features - which in this case are facial landmarks (eyes, nose, mouth).
OAK-D camera does that for every pixel in the mono frame - it goes through pixels on the first mono frame, finds the same point/feature on the second mono frame, and assigns a disparity value (in pixels) with some confidence for every pixel. This all happens inside the StereoDepth node. The depth map is calculated from the disparity map (on the camera) using this formula.
Disparity matching won’t work well with blank, featureless surfaces (like walls or ceilings) when using passive stereo depth perception. That’s because disparity matching will have a hard time matching points/features from left/right images - as there are no distinctive points/features in either frame. That’s where active stereo depth perception is needed.
Passive stereo accuracy/smoothness depends on:
Lighting/Texture. Stereo depth depends on feature matching, and in a low light environment, features aren’t as visible. As mentioned in the paragraph above, featureless surfaces (like walls) aren’t suited for passive stereo depth perception. Active stereo resolves both texture and lighting requirements.
Calibration. Factory calibration should be optimal.
Postprocessing filters, documentation here (under Depth Filters). Additional filtering can be performed on the host-side as well, eg. WLS.
Active stereo depth perception¶
On our OAK Pro cameras, we use conventional active stereo vision (ASV). A dot projector is used to project many small dots in front of the device, which helps with disparity matching, especially for low-visual-interest surfaces (blank surfaces with little to no texture), such as a wall or ceiling.
The stereo matching process is performed exactly the same way as with passive stereo perception, the dots only help with the accuracy.
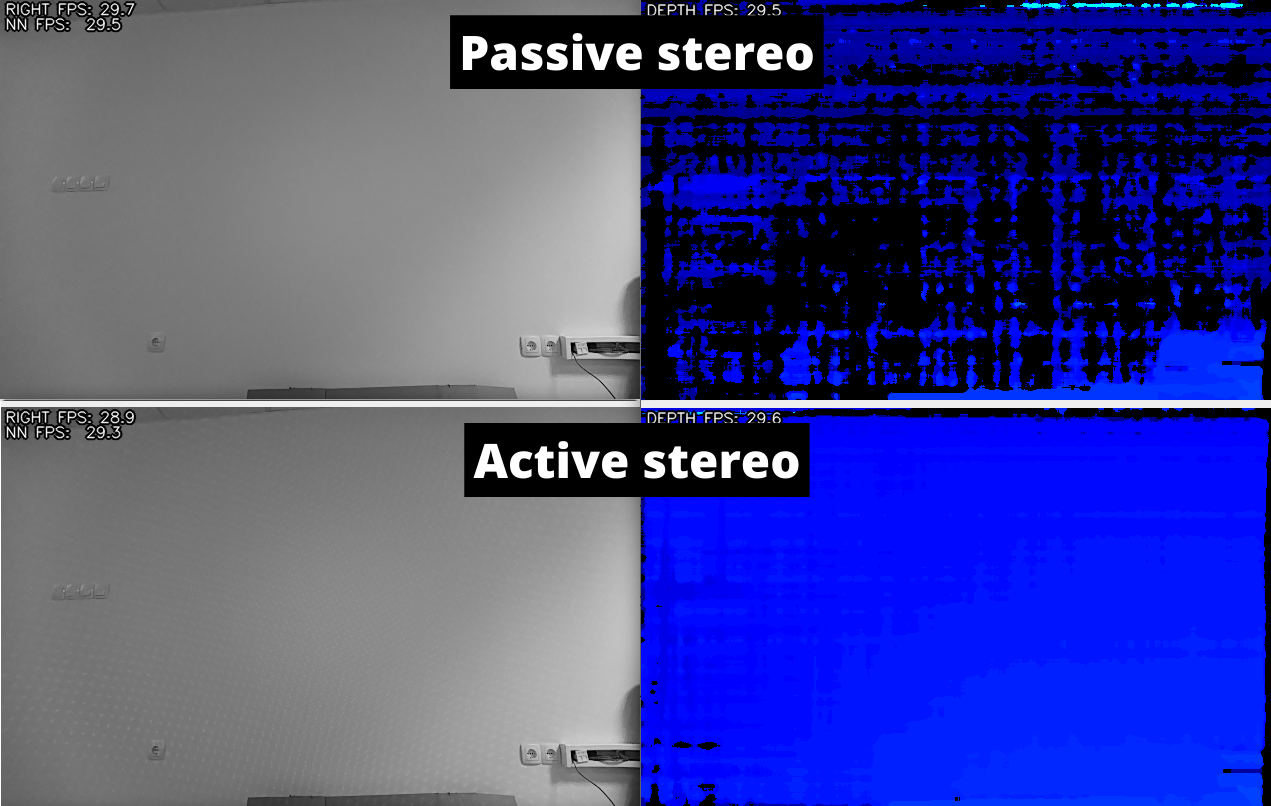
Here you can see passive and active stereo perception when the OAK camera is faced against a wall. If you look closely at the mono image (bottom left), you can see many small dots being projected onto the wall.
Time-of-Flight depth perception¶
Stereo perception has its pros and cons. It’s cheap, can perceive depth at greater distances, and has a high resolution. On the other hand, it’s not as accurate. So for high-accuracy applications, Time-of-Flight (ToF) approach is suggested, as it can provide sub-centimeter depth accuracy.
We have built a ToF FFC module that can be used with OAK-FFC and in the future, we will create a standalone camera with ToF sensor onboard.
On the gif above you can see high accuracy (especially at low FPS) point-cloud that was produced using a ToF FFC module and a color camera. ToF resolution here is 244x172.