NN 分辨率技术
- 输入帧 AR 不匹配 - 当您的 NN 模型期望的宽高比与传感器的宽高比不同时
- NN 输出的可视化 - 当您想在高分辨率下可视化 NN 输出时
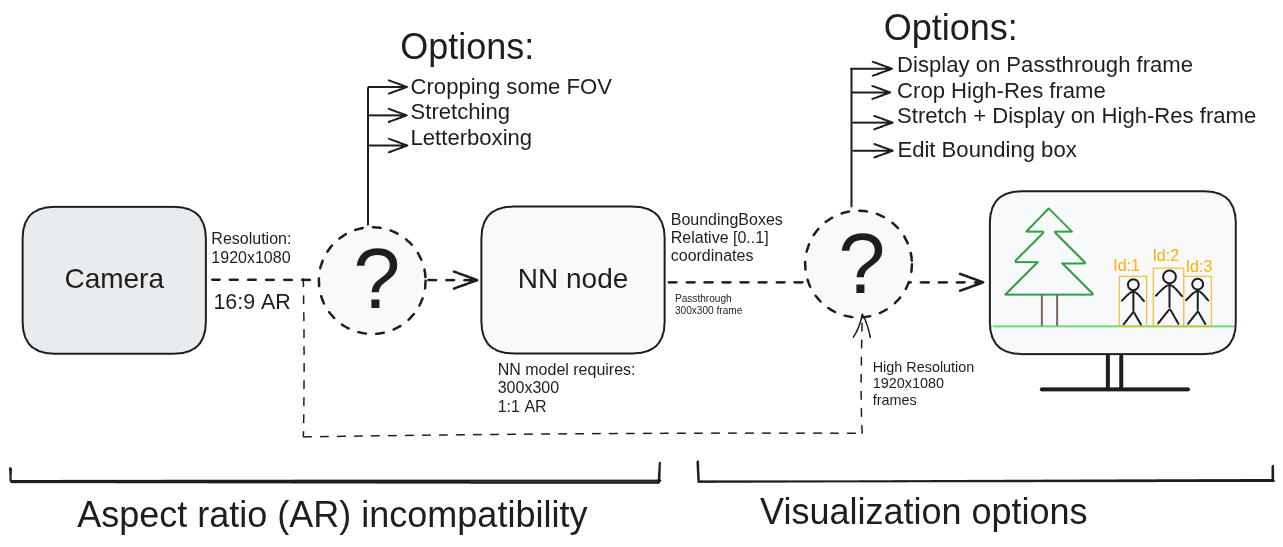
输入帧 AR 不匹配
- 裁剪 ISP 帧以匹配 1:1 的宽高比,从而丢失部分 FOV
- 将 ISP 帧拉伸以匹配 NN 的 1:1 宽高比
- 对 ISP 帧应用信箱模式以获得 1:1 的宽高比帧
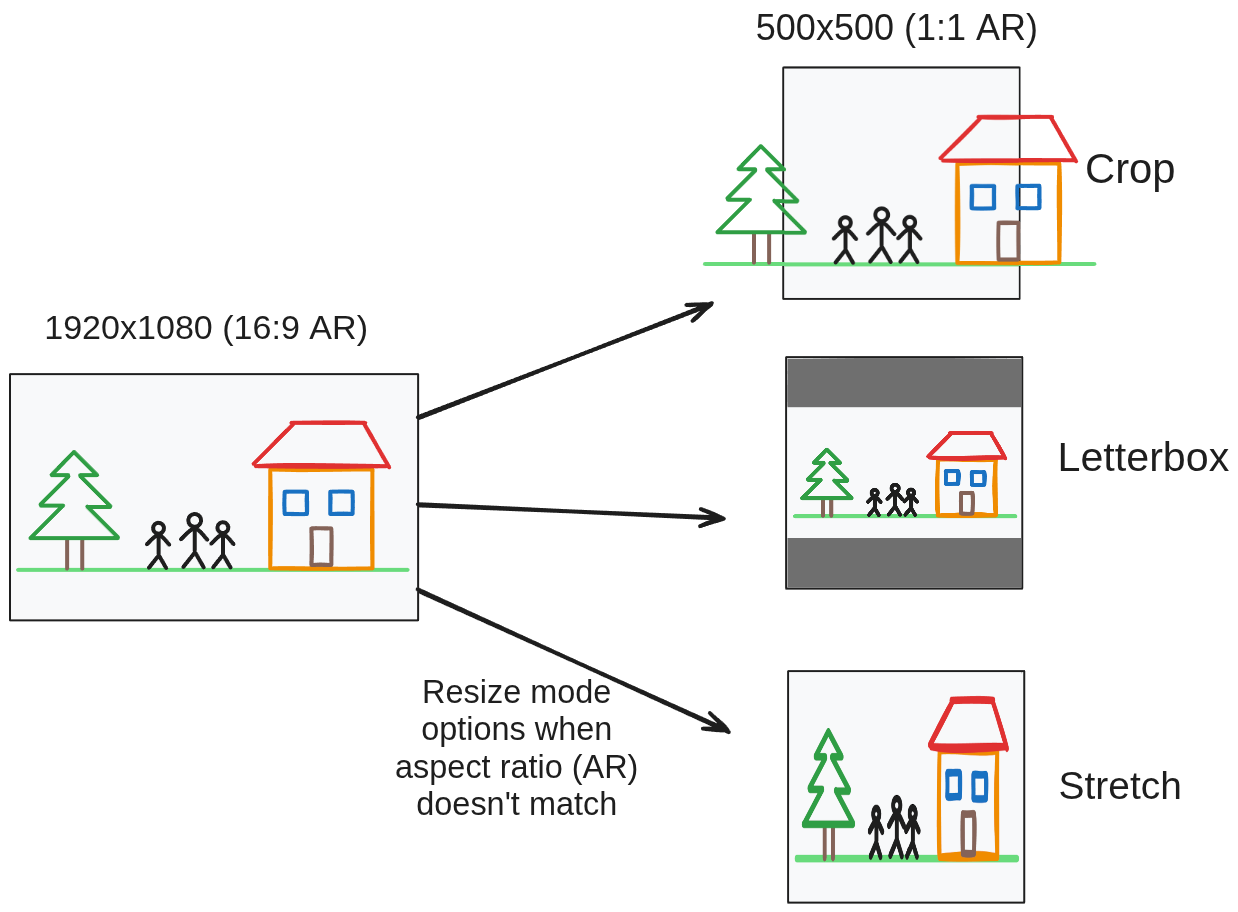
裁剪
信箱模式
manip.setResizeThumbnail(x,y) 来实现此目的。使用此方法的缺点是您的实际图像会变小,因此某些特征可能无法保留,这可能意味着 NN 准确度会下降。 使用示例在此。拉伸
camRgb.setPreviewKeepAspectRatio(False) 进行配置。这意味着不会保留宽高比,图像会被“拉伸”。这对于某些现成的 NN 模型可能存在问题,因此可能需要进行一些微调。 使用示例在此。显示高分辨率检测
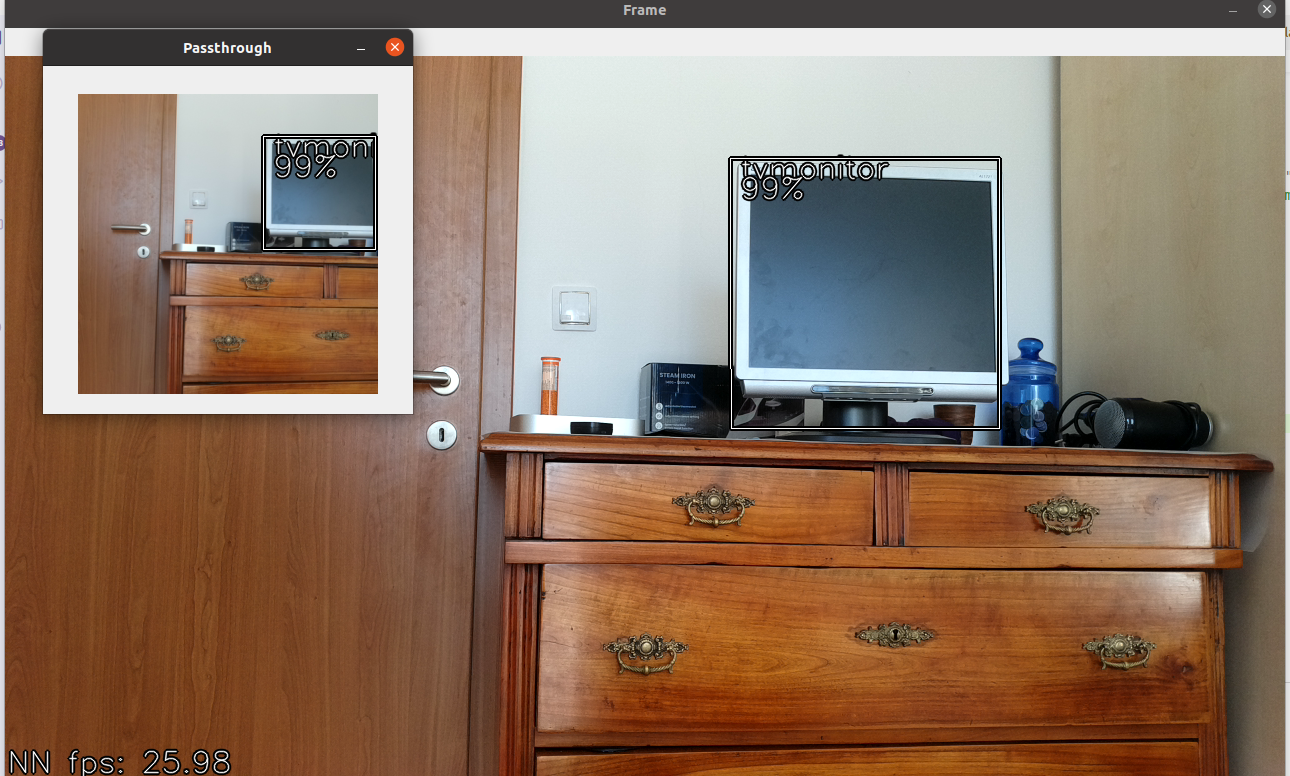
300x300 或 416x416)。与其在如此小的帧上显示边界框,不如流式传输更高分辨率的帧(例如 ColorCamera 的 video 输出)并在高分辨率帧上显示边界框。有几种方法可以实现这一点,在本节中我们将对其进行探讨。直通
passthrough 帧,以便边界框与帧同步。另一种选择是从 ColorCamera 流式传输 preview 帧,并在主机上同步(或根本不同步)。下面是带有检测的 300x300 帧。演示代码在此。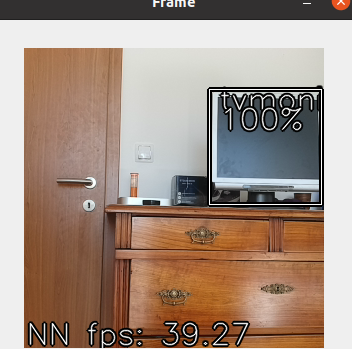
裁剪高分辨率帧
ColorCamera 的 video 输出)流式传输到主机,并在其上绘制边界框。为了使边界框与帧匹配,preview 和 video 的尺寸应具有相同的宽高比,即 1:1。在此示例中,我们将 4k 分辨率缩小到 720P,因此最大分辨率为 720x720,这正是我们使用的分辨率(camRgb.setVideoSize(720,720))。我们也可以使用 1080P 分辨率并将 1080x1080 帧流式传输回主机。 演示代码在此。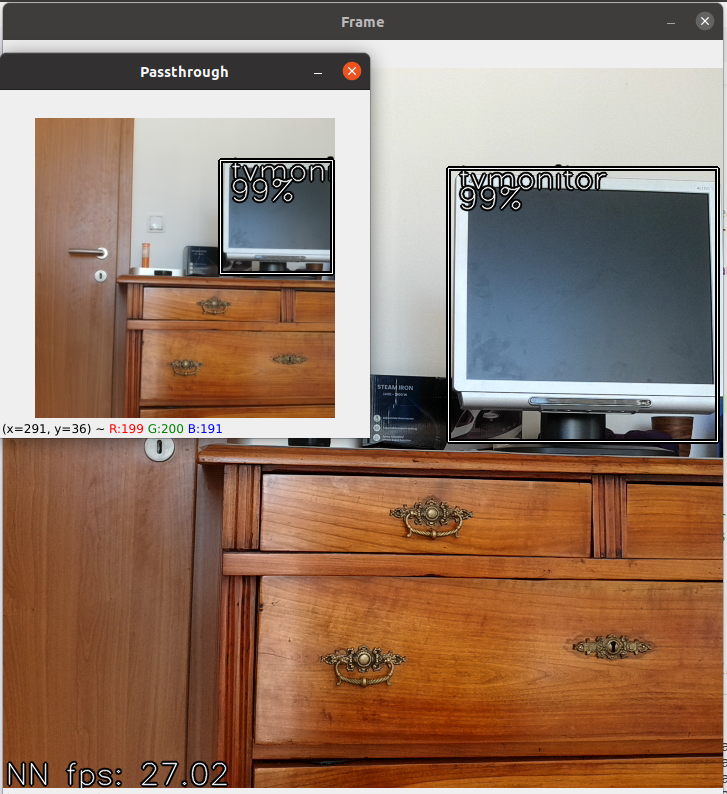
拉伸帧
1:1,而不是我们摄像机分辨率的 16:9。这意味着会丢失部分 FOV。上面(输入帧 AR 不匹配)我们展示了改变宽高比将保留摄像机的��整个 FOV,但它会“挤压/拉伸”帧,如下图所示。 演示代码在此。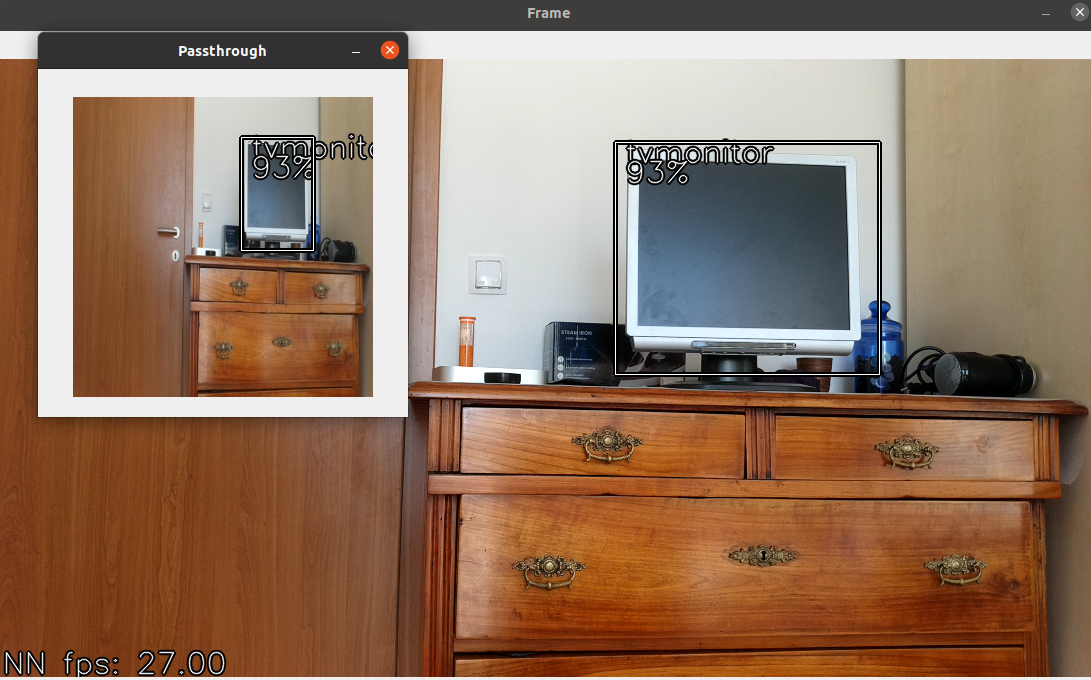
编辑边界框
video,并在 300x300 帧上进行推理。但是,这需要我们重新计算边界框以匹配图像的不同宽高比。此方法不保留整个宽高比,它仅在完整的 FOV video 帧上显示边界框�。 演示代码在此。