空间人工智能
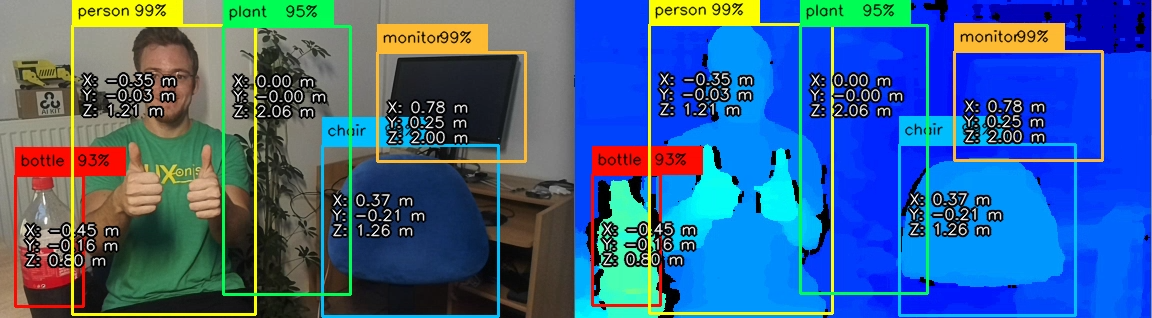
神经网络推理与深度图融合
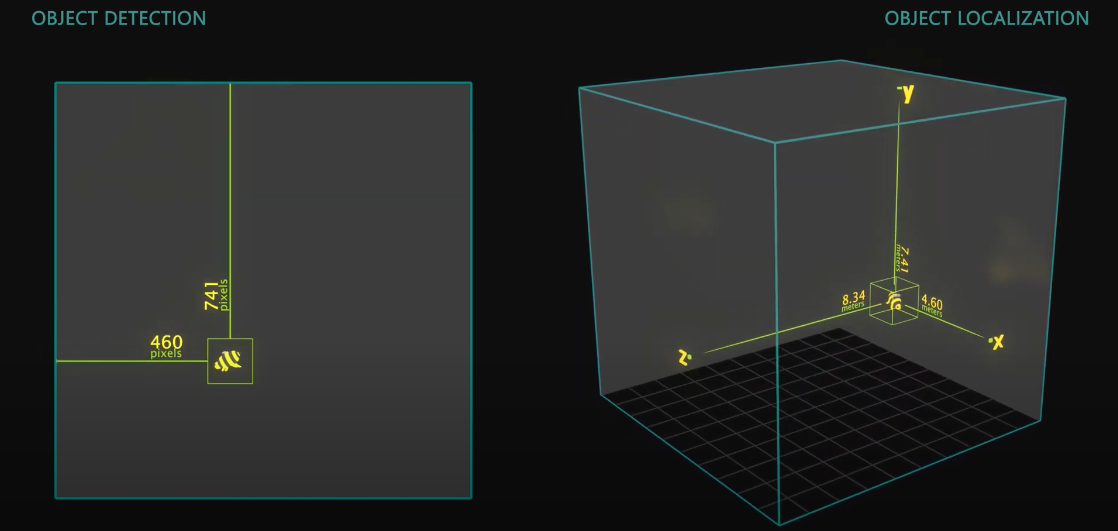
3D 物体定位
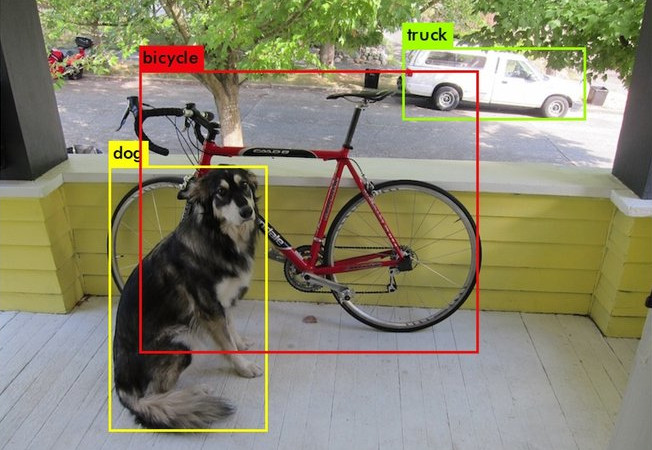
神经网络解码
DepthAI API 提供了一种简单的方法来解码神经网络结果,包括边界框、标签和置信度分数。这对于 Yolo 和 MobileNet 神经网络架构是可行的。对于任何自定义神经网络,您都可以使用标准的 NeuralNetwork 节点,但您需要自己解码结果。
3D 地标定位
语义深度


立体神经网络推理
- 面部地标(眼睛、耳朵、鼻子、嘴唇边缘等)
- 产品上的特征(螺丝孔、瑕疵等)
- 人体上的关节(例如,肘部、膝盖、臀部等)
- 车辆上的特征(例如,后视镜、前灯等)
- 植物上的害虫或疾病(即,对于物体检测 + 立体深度来说太小的特征)
需要帮助?
请前往 Discussion Forum 获取技术支持或提出您可能有的任何其他问题。