IMX582
| Spec | Value |
|---|---|
| Shutter type | rolling |
| Type | color |
| Sensor size | 1/2" (12.7mm) |
| Pixel size | 0.8 μm |
| Platform Support | RVC2, RVC4 |
RVC2 supported resolutions
| Resolution name | Resolution size | Max FPS | MIPI lanes | Mode |
|---|---|---|---|---|
THE_48_MP | 5312x6000 | 10 | 4 | Full resolution and maps to THE_5312X6000 (not supported) |
THE_5312X6000 | 5312x6000 | 10 | 4 | Width is cropped - QBC remosaic’ed mode |
THE_4000X3000 | 4000x3000 | 30 | 4 | Full FOV - QBC Binning |
THE_4_K | 3840x2160 | 42 | 4 | QBC Binning (to 4000x3000) then Cropping |
RVC4 supported resolutions
| Resolution name | Resolution size | Max FPS | MIPI lanes | Mode |
|---|---|---|---|---|
/ | 8000x6000 | 18.9 | 4 | Full resolution |
/ | 4000x3000 | 30 | 4 | Binning 2x2 |
RVC2 driver limits
Manual limits
- Min FPS: 1.67
- Min exposure time: 1 μs
- Max exposure time:
1 / CAM_FPSseconds. Eg. 33ms @ 30FPS
Auto limits
- Min exposure time: 101 μs
- Max exposure time: Depends on the Anti-Banding mode:
- Anti-Banding mode OFF: 33 ms
- Anti-Banding mode 50Hz: 30 ms
- Anti-Banding mode 60Hz: 25 ms
Python
1cam = pipeline.create(dai.node.ColorCamera) # Or MonoCamera
2# "OFF", "MAINS_50_HZ", or "MAINS_60_HZ"
3cam.initialControl.setAntiBandingMode(dai.CameraControl.AntiBandingMode.OFF)IMX582 RAM consumption
Python
1cam = pipeline.create(dai.node.ColorCamera)
2cam.setResolution(dai.ColorCameraProperties.SensorResolution.THE_5312X6000) # 32MP
3# Decrease pool sizes for all outputs (raw, isp, preview, video, still):
4cam.setNumFramesPool(2,2,1,1,1)High Dynamic Range (HDR)
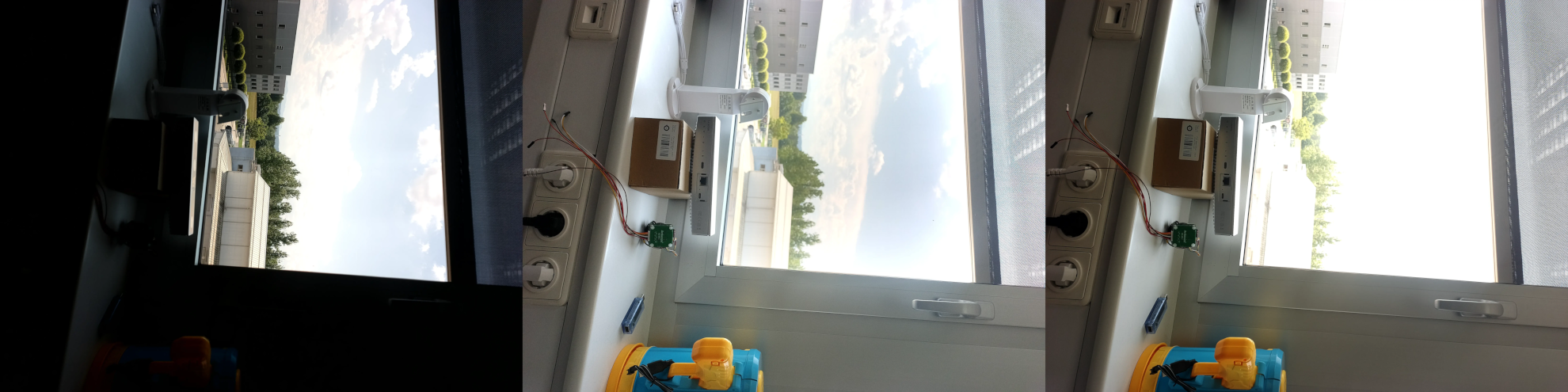
Command Line
1python3 cam_test.py -cams rgb,c -rs -cres 12mp -fps 10 -misc hdr-exposure-ratio=4 hdr-local-tone-weight=75