OAK-D W PoE¶
Overview¶
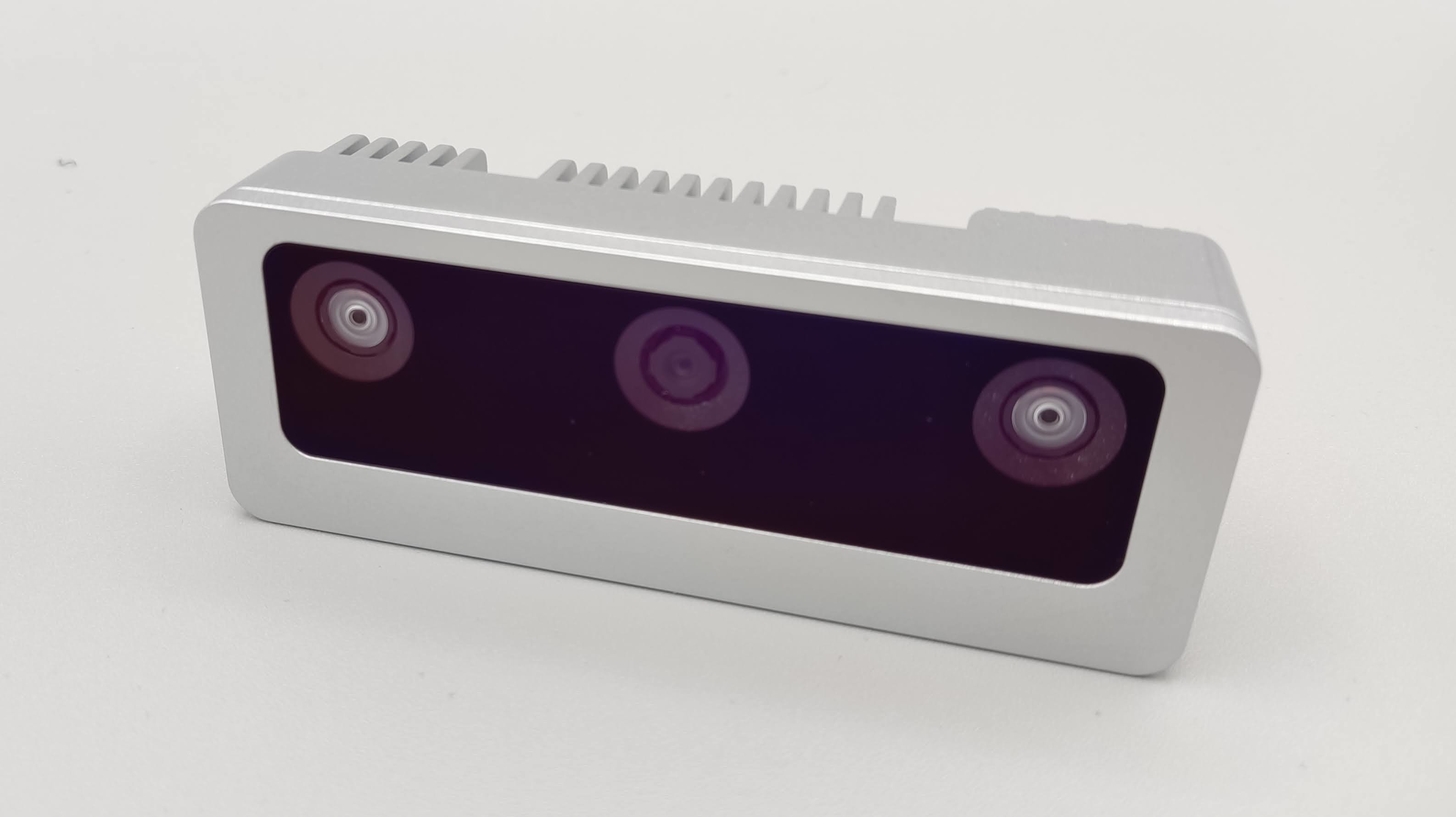
The OAK-D W PoE is a Wide Field of View (FoV) version of the OAK-D S2 PoE.
It also has industrial M12 PoE connector (instead of RJ45) and additionally features M8 connector for IO connectivity; USB2 (D+, D-), camera IOs (FSIN, STROBE), power, and one auxiliary GPIO.
Looking for the Normal FOV OAK-D W PoE? You can find it here.
Hardware specifications¶
This OAK camera uses Power-over-Ethernet (PoE) for communication and power. It offers full 802.3af and Class 3 PoE compliance with 1000BASE-T speeds (1 Gbps). A PoE injector/switch is required to power the device. It also features an IP65-rated enclosure.
Camera module specifications¶
For the wide FOV version you can select either 120° DFOV IMX378 (12MP, rolling shutter) or 150° DFOV color OV9782 (1MP, global shutter) color camera.
Camera Specs |
Color camera |
Stereo pair |
|---|---|---|
Sensor |
IMX378 (PY060) |
OV9282 (PY059) |
DFOV / HFOV / VFOV |
||
Rectified Depth FOV |
N/A |
|
Resolution |
12MP (4056x3040) |
1MP (1280x800) |
Focus |
FF: 60cm - ∞ |
FF: 18cm - ∞ |
Max Framerate |
60 FPS |
120 FPS |
F-number |
2.8 ±5% |
2 ±5% |
Lens size |
1/2.3 inch |
1/4 inch |
Effective Focal Length |
2.75mm |
1.69mm |
Pixel size |
1.55µm x 1.55µm |
3µm x 3µm |
Wide FOV lenses can only be fixed-focus.

Left: normal FOV, Right: Wide FOV
For the wide FOV version you can select either 120° DFOV IMX378 (12MP, rolling shutter) or 150° DFOV color OV9782 (1MP, global shutter) color camera.
Camera Specs |
Color camera |
Stereo pair |
|---|---|---|
Sensor |
OV9782 (PY058) |
OV9282 (PY059) |
DFOV / HFOV / VFOV |
||
Rectified Depth FOV |
N/A |
|
Resolution |
1MP (1280x800) |
1MP (1280x800) |
Focus |
FF: 18cm - ∞ |
FF: 18cm - ∞ |
Max Framerate |
120 FPS (800P) |
120 FPS (800P) |
F-number |
2 ±5% |
2 ±5% |
Lens size |
1/4 inch |
1/4 inch |
Effective Focal Length |
1.69mm |
1.69mm |
Pixel size |
3µm x 3µm |
3µm x 3µm |
Wide FOV lenses can only be fixed-focus.
Left: normal FOV, Right: Wide FOV
RVC2 inside¶
This OAK device is built on top of the RVC2. Main features:
4 TOPS of processing power (1.4 TOPS for AI - RVC2 NN Performance)
Run any AI model, even custom-architectured/built ones - models need to be converted.
Encoding: H.264, H.265, MJPEG
Computer vision: warp/dewarp, resize, crop via ImageManip node, edge detection, feature tracking. You can also run custom CV functions
Stereo depth perception with filtering, post-processing, RGB-depth alignment, and high configurability
Object tracking: 2D and 3D tracking with ObjectTracker node
Connectors¶
M8 aux connector has 8pin female A-coded connector and the M12 ethernet has 8pin female X-coded connector.

M12 pin |
M8 pin |
M8 functionality |
|
|---|---|---|---|
1 |
Eth MX0+ |
AUX GPIO 3V3 |
3V3 auxiliary GPIO 52. Pull this pin high with 10k resistor at startup for USB boot. |
2 |
Eth MX0- |
FSYNC ISO |
Isolated Frame synchronization input signal for cameras |
3 |
Eth MX1+ |
USB D+ |
USB 2.0 interface that can be used to connect to the OAK device (eg. reflash) if USB boot is enabled (via AUX GPIO 3V3). |
4 |
Eth MX1- |
USB D- |
USB 2.0 interface that can be used to connect to the OAK device (eg. reflash) if USB boot is enabled (via AUX GPIO 3V3). |
5 |
Eth MX3+ |
VBUSIN |
This pin is used for sourcing 5V power to accessory devices connected to the M8 connector. If trying to boot the device in USB boot mode, this pin can also sink current. |
6 |
Eth MX3- |
Strobe ISO |
Isolated Strobe output signal for cameras (Open Collector) |
7 |
Eth MX2+ |
Isolated GND |
Isolated ground for Strobe/FSYNC |
8 |
Eth MX2- |
GND |
Ground. |
Cameras also include an M8 connector cap for waterproofing in case the M8 connector wouldn’t be used.

External triggering: Sensors require 1V8 rising edge on FSYNC for the trigger event. We are using an optocoupler and ESD protection diode, so the input trigger voltage should be 12V (up to 24V) and the trigger logic is reversed, so trigger event happens at 0V on the FSYNC line. For an example, see External FSYNC Example.

Stereo depth perception¶
This OAK camera has a baseline of 7.5cm - the distance between the left and the right stereo camera. Minimal and maximal depth perception (MinZ and Max) depends on camera FOV, resolution, and baseline- more information here.
Ideal range: 40cm - 6m
MinZ: ~20cm (400P OR 800P, extended), ~37cm (800P)
MaxZ: ~10 meters with a variance of 10%
Extended means that StereoDepth node has Extended disparity mode enabled.
Integrated IMU¶
This OAK camera has an integrated BNO085, a 9-axis IMU (Inertial Measurement Unit). See IMU node for the API details on how to use it.
Note: due to supply chain issues, most of the OAK camera that were manufactured between Q2 2021 and Q2 2023 have integrated BMI270 - 6-axis IMU instead.
Power consumption¶
Most of the power is consumed by the RVC2, so the power consumption mostly depends on the workload of the chip:
Base consumption + PoE circuitry + camera streaming: 3W - 3.5W
AI subsystem consumption: Up to 1W
Stereo depth pipeline subsystem: Up to 0.5W
Video Encoder subsystem: Up to 0.5W
So the total power consumption can be up to ~5.5W if you are using all the features at 100% at the same time. To reduce the power consumption, you can reduce FPS of the whole pipeline - that way, subsystems won’t be utilized at 100% and will consume less power.
Operating temperature¶
The ambient operating temperature of RVC2 based devices is between -20°C and 50°C when fully utilizing the VPU.
Similarly to the Power consumption, max operating temperature depends on VPU utilization. The higher the VPU utilization, the more heat the VPU will generate. The RVC2 VPU can continuously operate at 105 °C, after which the depthai library will automatically shut down the device (to avoid chip damage).
To find out more, see our Operative temperature range documentation.
Vibration Testing¶
This OAK device has been tested for vibration tolerance according to the EN 60068-2-6:2008 standard:
Vibration Report - Report of the vibration stress tests performed by the SIQ (3rd-party lab)
Vibration Results - Results of Camera Focus, Camera Angles, and Stereo Depth Accuracy before and after the vibration stress tests
More information can be found at Vibration Tolerance documentation.
Operational Temperature¶
This device is rated to withstand temperatures within the range of -33° C - 55° C. Use in temperatures outside of this range may result in device failure.