OAK Thermal¶
Buy it on Luxonis shop - Early Access

Overview¶
The OAK-T (OAK Thermal) is our first camera with a thermal sensor and a color image sensor.
When fusing thermal frames, color frames, and AI models, you can create a wide variety of applications in different fields, such as:
Agriculture: Health crop, detect irrigation issues, detect pests, livestock health monitoring, etc.
Industrial: Detect overheating, detect leaks, detect fires, etc.
Security: Detect intruders (night vision), detect fires, etc.
Transportation: Detect pedestrians, vehicles, bicycles for analytics and traffic optimization…

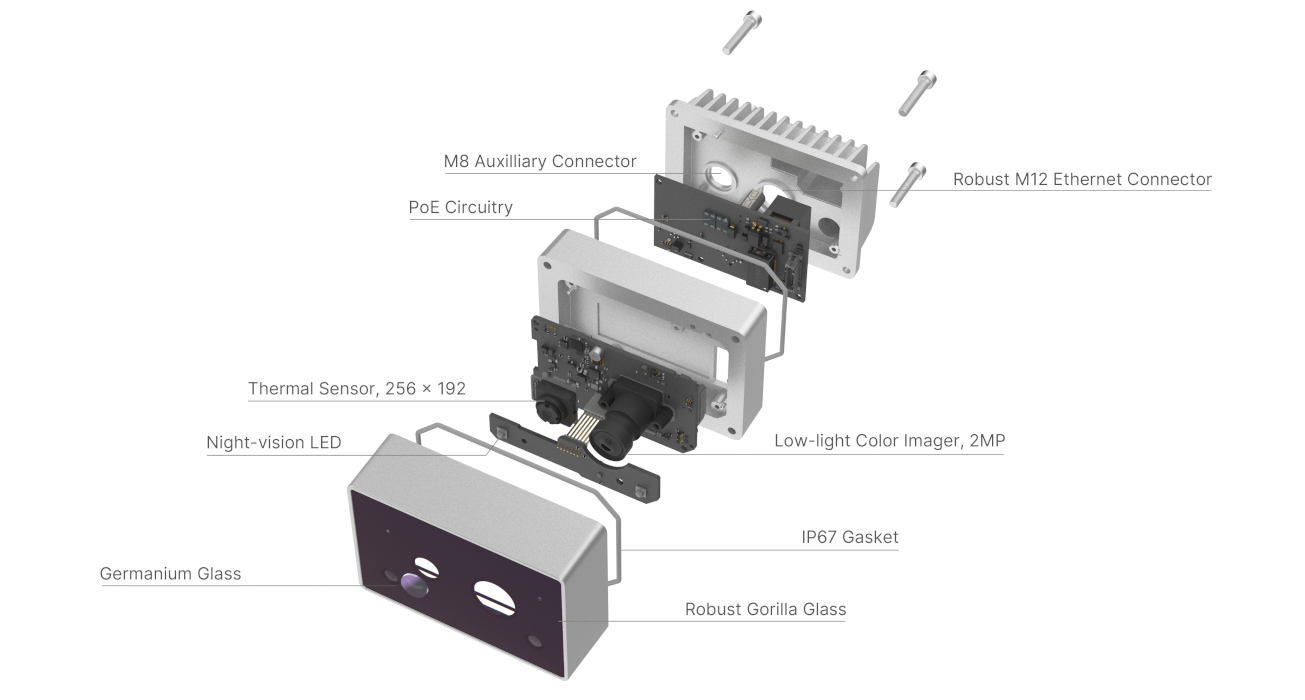
It leverages our OAK-SoM-Pro to make an overall compact design. The use of the SoM reduces the design’s scale, making it easier to mount or fit anywhere seamlessly. The design will also be open-source when we verify the hardware design.
Hardware specifications¶
This OAK camera uses Power-over-Ethernet (PoE) for communication and power. It offers full 802.3af and Class 3 PoE compliance with 1000BASE-T speeds (1 Gbps). A PoE injector/switch is required to power the device. It also features an IP67-rated enclosure.
Camera module specifications¶
Camera Specs |
Color |
Thermal |
|---|---|---|
Sensor |
IMX462 (PY154) |
|
DFOV / HFOV / VFOV |
||
Resolution |
2.1MP (1920x1080) |
256x192 |
Range / Focus |
60cm - ∞ |
30cm - ∞ |
Max Framerate |
30 FPS (2.1MP) |
25 FPS (256x192) |
Pixel size |
2.9µm |
12μm |
Lens size |
1/2.8 inch |
|
F-number |
1 ± 10% |
1.1 |
Effective Focal Length |
3.9mm |
RVC2 inside¶
This OAK device is built on top of the RVC2. Main features:
4 TOPS of processing power (1.4 TOPS for AI - RVC2 NN Performance)
Run any AI model, even custom-architectured/built ones - models need to be converted.
Encoding: H.264, H.265, MJPEG
Computer vision: warp/dewarp, resize, crop via ImageManip node, edge detection, feature tracking. You can also run custom CV functions
Stereo depth perception with filtering, post-processing, RGB-depth alignment, and high configurability
Object tracking: 2D and 3D tracking with ObjectTracker node
Thermal perception¶
Thermal cameras detect infrared radiation, which is emitted by all objects based on their temperature. We use a special IR-capable lens to focus the infrared light emitted by all of the objects/scene in view, which is then scanned by an array of infrared-detector elements (“pixels”) in the camera.
Specs |
Value |
|---|---|
Sensor part number |
Tiny1- C 256 02011 X H WR |
Measurement range |
-15°C - 150°C |
Thermal sensitivity |
50mK @ 25°C and 25Hz |
Thermal Accuracy |
±2°C or ±2% |
Sensor type |
Uncooled VOx detector |
Spectral range |
8-14µm |
Operating temperature |
-10°C - 75°C |
Power consumption |
<1W |
Communication |
SPI (data) and I2C (control) |
Thermal perception range¶
Thermal perception range is similar to color camera’s range, it mostly depends on the object’s size and temperature. For example, with you can easily detect a large building even from 1km away, but you won’t be able to detect a small animal from that distance.
The following table shows the approximate thermal perception range for different object sizes:
Object |
Size |
Detection |
Recognition |
Identification |
|---|---|---|---|---|
Human |
1.8m x 0.5m |
200m |
50m |
25m |
Car |
4.5m x 2m |
500m |
125m |
63m |
The DRI (Detection, Recognition, Identification) ranges are based on the Johnson’s criteria, which is a standard for optical systems. Specifications are as follows:
Detection: The ability to notice that something is there, but without the ability to identify it
Recognition: Being able to classify the type of object (like distinguishing a car from a truck)
Identification: The capability to specify the exact nature of the object (like determining the make and model of a car).
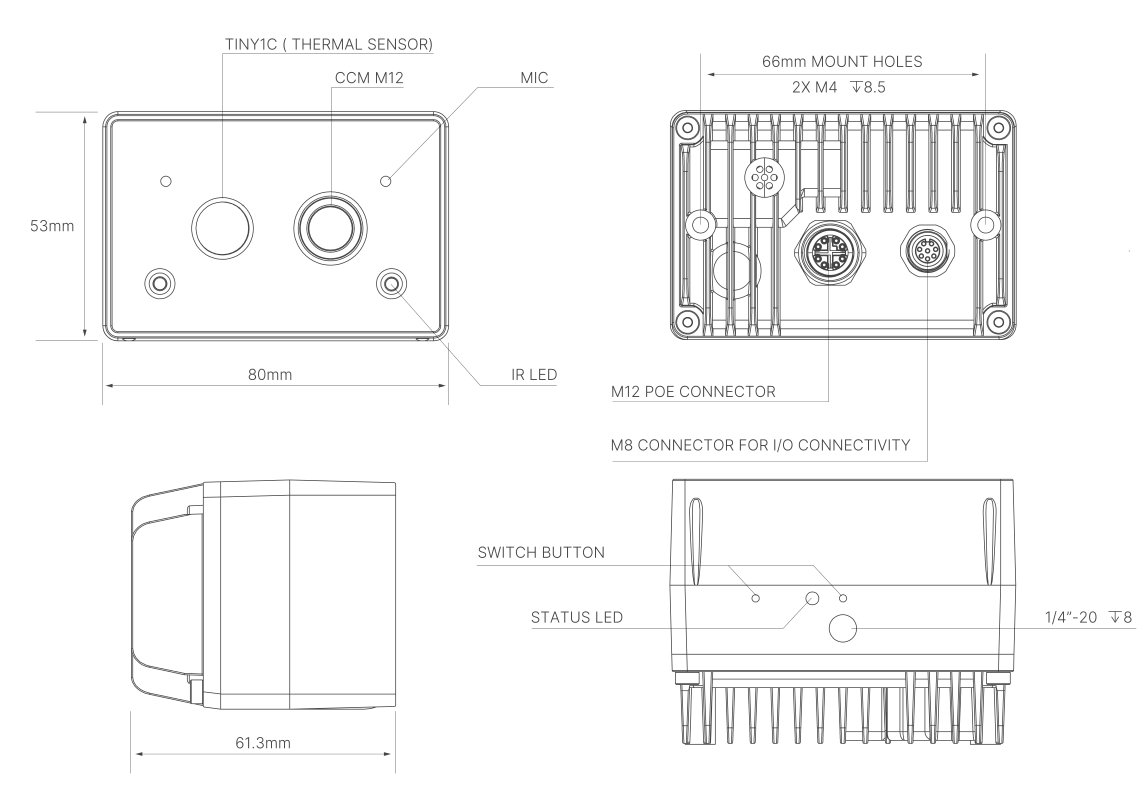
Connectors¶
M8 aux connector has 8pin female A-coded connector and the M12 ethernet has 8pin female X-coded connector.

M12 pin |
M8 pin |
M8 functionality |
|
|---|---|---|---|
1 |
Eth MX0+ |
BOOT/I2S_IN |
Pull this pin high with 10k resistor at startup for USB boot |
2 |
Eth MX0- |
FSYNC |
Hardware Frame Synchronization input/output signal for cameras |
3 |
Eth MX1+ |
USB D+ |
USB 2.0 interface that can be used to connect to the OAK device (eg. reflash) if USB boot is enabled (via AUX GPIO 3V3) |
4 |
Eth MX1- |
USB D- |
USB 2.0 interface that can be used to connect to the OAK device (eg. reflash) if USB boot is enabled (via AUX GPIO 3V3) |
5 |
Eth MX3+ |
VBUS |
This pin is used for sourcing 5V power to external devices connected to the M8 connector. If trying to boot the device in USB boot mode, this pin can also sink current |
6 |
Eth MX3- |
STROBE/I2S_SCK |
Strobe output signal for cameras or I2S SCK, depends on internal switch configuration |
7 |
Eth MX2+ |
IO3/I2S_WS |
1-wire communication or I2S_WS signal |
8 |
Eth MX2- |
GND |
Ground |
Cameras also include an M8 connector cap for waterproofing in case the M8 connector wouldn’t be used.

External triggering: Sensors require 1V8 rising edge on FSYNC for the trigger event. We are using an optocoupler and ESD protection diode, so the input trigger voltage should be 12V (up to 24V) and the trigger logic is reversed, so trigger event happens at 0V on the FSYNC line. For an example, see External FSYNC Example.
Power consumption¶
Most of the power is consumed by the RVC2, so the power consumption mostly depends on the workload of the chip:
Base consumption + PoE circuitry + camera streaming: 3W - 3.5W
Thermal sensor: Up to 1W
AI subsystem consumption: Up to 1W
Stereo depth pipeline subsystem: Up to 0.5W
Video Encoder subsystem: Up to 0.5W
So the total power consumption can be up to ~6.5W if you are using all the features at 100% at the same time. To reduce the power consumption, you can reduce FPS of the whole pipeline - that way, subsystems won’t be utilized at 100% and will consume less power.
Operating temperature¶
The ambient operating temperature of RVC2 based devices is between -20°C and 50°C when fully utilizing the VPU.
Similarly to the Power consumption, max operating temperature depends on VPU utilization. The higher the VPU utilization, the more heat the VPU will generate. The RVC2 VPU can continuously operate at 105 °C, after which the depthai library will automatically shut down the device (to avoid chip damage).
To find out more, see our Operative temperature range documentation.