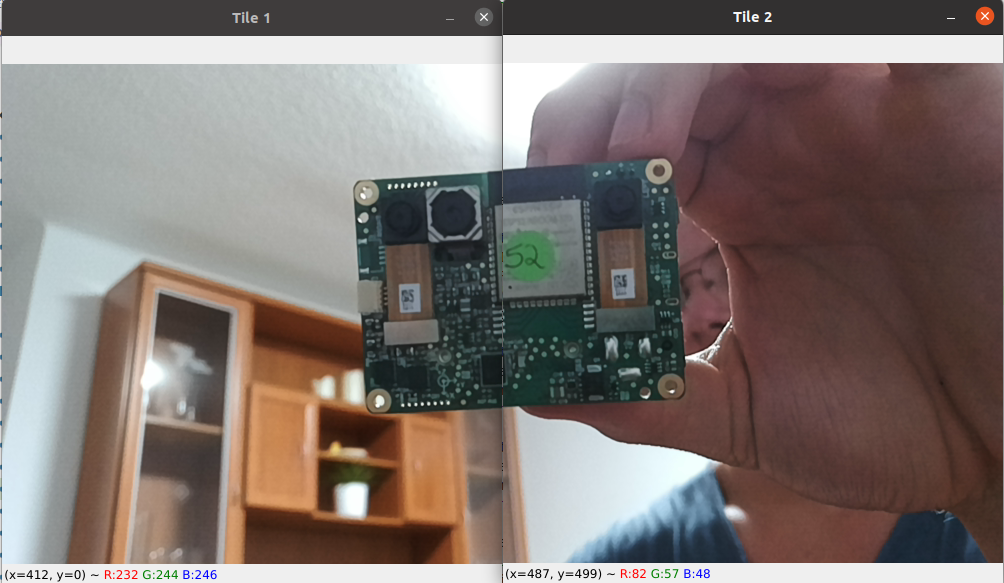
ImageManip 瓦片
1000x500 预览帧分割成两个 500x500 的帧。演示
设置
Command Line
1git clone https://github.com/luxonis/depthai-python.git
2cd depthai-python/examples
3python3 install_requirements.py源代码
Python
PythonGitHub
1#!/usr/bin/env python3
2
3import cv2
4import depthai as dai
5
6# Create pipeline
7pipeline = dai.Pipeline()
8
9camRgb = pipeline.create(dai.node.ColorCamera)
10camRgb.setPreviewSize(1000, 500)
11camRgb.setInterleaved(False)
12maxFrameSize = camRgb.getPreviewHeight() * camRgb.getPreviewWidth() * 3
13
14# In this example we use 2 imageManips for splitting the original 1000x500
15# preview frame into 2 500x500 frames
16manip1 = pipeline.create(dai.node.ImageManip)
17manip1.initialConfig.setCropRect(0, 0, 0.5, 1)
18manip1.setMaxOutputFrameSize(maxFrameSize)
19camRgb.preview.link(manip1.inputImage)
20
21manip2 = pipeline.create(dai.node.ImageManip)
22manip2.initialConfig.setCropRect(0.5, 0, 1, 1)
23manip2.setMaxOutputFrameSize(maxFrameSize)
24camRgb.preview.link(manip2.inputImage)
25
26xout1 = pipeline.create(dai.node.XLinkOut)
27xout1.setStreamName('out1')
28manip1.out.link(xout1.input)
29
30xout2 = pipeline.create(dai.node.XLinkOut)
31xout2.setStreamName('out2')
32manip2.out.link(xout2.input)
33
34# Connect to device and start pipeline
35with dai.Device(pipeline) as device:
36 # Output queue will be used to get the rgb frames from the output defined above
37 q1 = device.getOutputQueue(name="out1", maxSize=4, blocking=False)
38 q2 = device.getOutputQueue(name="out2", maxSize=4, blocking=False)
39
40 while True:
41 if q1.has():
42 cv2.imshow("Tile 1", q1.get().getCvFrame())
43
44 if q2.has():
45 cv2.imshow("Tile 2", q2.get().getCvFrame())
46
47 if cv2.waitKey(1) == ord('q'):
48 break流图
需要帮助?
请前往 Discussion Forum 获取技术支持或提出您可能有的任何其他�问题。