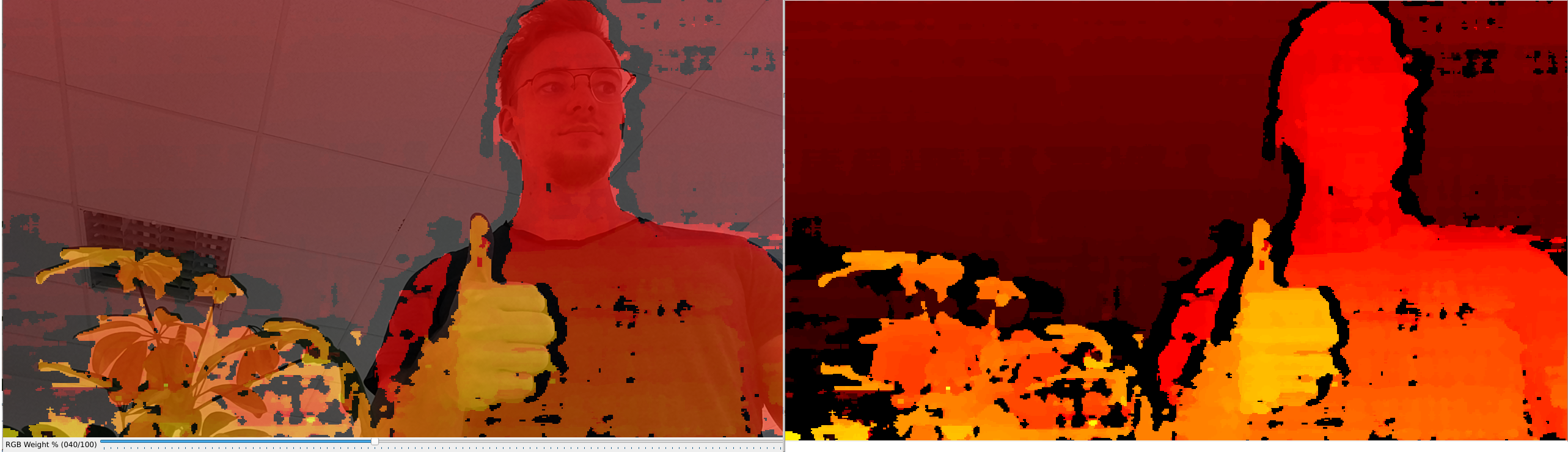
RGB 深度对齐
您也可以使用 ImageAlign 节点执行深度对齐(示例),但我们建议使用 StereoDepth 的对齐以获得更好的性能。
stereo.setOutputSize(width, height) 来避免深度缩放。要将深度图与更高分辨率的彩色流(例如 12MP)对齐,您需要限制深度图的分辨率。您可以通过 stereo.setOutputSize(w,h) 来实现。代码 示例在此。演示
设置
Command Line
1git clone https://github.com/luxonis/depthai-python.git
2cd depthai-python/examples
3python3 install_requirements.py源代码
Python
PythonGitHub
1#!/usr/bin/env python3
2
3import cv2
4import numpy as np
5import depthai as dai
6import argparse
7
8# Weights to use when blending depth/rgb image (should equal 1.0)
9rgbWeight = 0.4
10depthWeight = 0.6
11
12parser = argparse.ArgumentParser()
13parser.add_argument('-alpha', type=float, default=None, help="Alpha scaling parameter to increase float. [0,1] valid interval.")
14args = parser.parse_args()
15alpha = args.alpha
16
17def updateBlendWeights(percent_rgb):
18 """
19 Update the rgb and depth weights used to blend depth/rgb image
20
21 @param[in] percent_rgb The rgb weight expressed as a percentage (0..100)
22 """
23 global depthWeight
24 global rgbWeight
25 rgbWeight = float(percent_rgb)/100.0
26 depthWeight = 1.0 - rgbWeight
27
28
29fps = 30
30# The disparity is computed at this resolution, then upscaled to RGB resolution
31monoResolution = dai.MonoCameraProperties.SensorResolution.THE_720_P
32
33# Create pipeline
34pipeline = dai.Pipeline()
35device = dai.Device()
36queueNames = []
37
38# Define sources and outputs
39camRgb = pipeline.create(dai.node.Camera)
40left = pipeline.create(dai.node.MonoCamera)
41right = pipeline.create(dai.node.MonoCamera)
42stereo = pipeline.create(dai.node.StereoDepth)
43
44rgbOut = pipeline.create(dai.node.XLinkOut)
45disparityOut = pipeline.create(dai.node.XLinkOut)
46
47rgbOut.setStreamName("rgb")
48queueNames.append("rgb")
49disparityOut.setStreamName("disp")
50queueNames.append("disp")
51
52#Properties
53rgbCamSocket = dai.CameraBoardSocket.CAM_A
54
55camRgb.setBoardSocket(rgbCamSocket)
56camRgb.setSize(1280, 720)
57camRgb.setFps(fps)
58
59# For now, RGB needs fixed focus to properly align with depth.
60# This value was used during calibration
61try:
62 calibData = device.readCalibration2()
63 lensPosition = calibData.getLensPosition(rgbCamSocket)
64 if lensPosition:
65 camRgb.initialControl.setManualFocus(lensPosition)
66except:
67 raise
68left.setResolution(monoResolution)
69left.setCamera("left")
70left.setFps(fps)
71right.setResolution(monoResolution)
72right.setCamera("right")
73right.setFps(fps)
74
75stereo.setDefaultProfilePreset(dai.node.StereoDepth.PresetMode.HIGH_DENSITY)
76# LR-check is required for depth alignment
77stereo.setLeftRightCheck(True)
78stereo.setDepthAlign(rgbCamSocket)
79
80# Linking
81camRgb.video.link(rgbOut.input)
82left.out.link(stereo.left)
83right.out.link(stereo.right)
84stereo.disparity.link(disparityOut.input)
85
86camRgb.setMeshSource(dai.CameraProperties.WarpMeshSource.CALIBRATION)
87if alpha is not None:
88 camRgb.setCalibrationAlpha(alpha)
89 stereo.setAlphaScaling(alpha)
90
91# Connect to device and start pipeline
92with device:
93 device.startPipeline(pipeline)
94
95 frameRgb = None
96 frameDisp = None
97
98 # Configure windows; trackbar adjusts blending ratio of rgb/depth
99 rgbWindowName = "rgb"
100 depthWindowName = "depth"
101 blendedWindowName = "rgb-depth"
102 cv2.namedWindow(rgbWindowName)
103 cv2.namedWindow(depthWindowName)
104 cv2.namedWindow(blendedWindowName)
105 cv2.createTrackbar('RGB Weight %', blendedWindowName, int(rgbWeight*100), 100, updateBlendWeights)
106
107 while True:
108 latestPacket = {}
109 latestPacket["rgb"] = None
110 latestPacket["disp"] = None
111
112 queueEvents = device.getQueueEvents(("rgb", "disp"))
113 for queueName in queueEvents:
114 packets = device.getOutputQueue(queueName).tryGetAll()
115 if len(packets) > 0:
116 latestPacket[queueName] = packets[-1]
117
118 if latestPacket["rgb"] is not None:
119 frameRgb = latestPacket["rgb"].getCvFrame()
120 cv2.imshow(rgbWindowName, frameRgb)
121
122 if latestPacket["disp"] is not None:
123 frameDisp = latestPacket["disp"].getFrame()
124 maxDisparity = stereo.initialConfig.getMaxDisparity()
125 # Optional, extend range 0..95 -> 0..255, for a better visualisation
126 if 1: frameDisp = (frameDisp * 255. / maxDisparity).astype(np.uint8)
127 # Optional, apply false colorization
128 if 1: frameDisp = cv2.applyColorMap(frameDisp, cv2.COLORMAP_HOT)
129 frameDisp = np.ascontiguousarray(frameDisp)
130 cv2.imshow(depthWindowName, frameDisp)
131
132 # Blend when both received
133 if frameRgb is not None and frameDisp is not None:
134 # Need to have both frames in BGR format before blending
135 if len(frameDisp.shape) < 3:
136 frameDisp = cv2.cvtColor(frameDisp, cv2.COLOR_GRAY2BGR)
137 blended = cv2.addWeighted(frameRgb, rgbWeight, frameDisp, depthWeight, 0)
138 cv2.imshow(blendedWindowName, blended)
139 frameRgb = None
140 frameDisp = None
141
142 if cv2.waitKey(1) == ord('q'):
143 breakPipeline
需要帮助?
请前往 Discussion Forum 获取技术支持或提出您可能有的任何其他问题。